Gallery details
Seeker is a custom-built search space algorithm designed to navigate complex environments and evaluate multiple criteria in real-time to determine the most intelligent next position for an agent to occupy. It operates not through linear optimization, but through adaptive spatial negotiation—constantly re-evaluating conditions based on contextual feedback. Unlike traditional pathfinding logic, Seeker is built to thrive in uncertainty—where terrain is unstable, variables are emergent, and goals are flexible. It has no fixed map. Instead, it defines “smartness” through interaction: observing what changes, where resistance forms, and how proximity, density, and vector logic affect movement. Seeker can be deployed in both abstract computational environments and embedded spatial systems—as a logic framework for robotic swarm coordination, field optimization, or architectural generation. It isn’t designed to reach a destination. It’s designed to decide—over and over again.
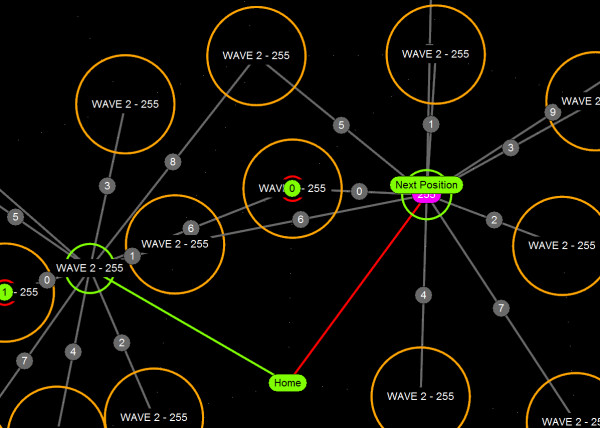
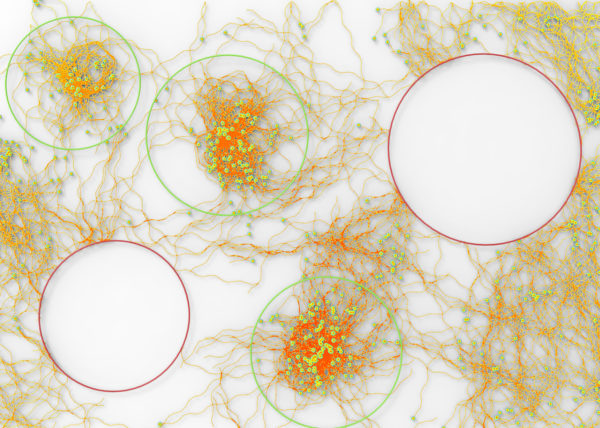
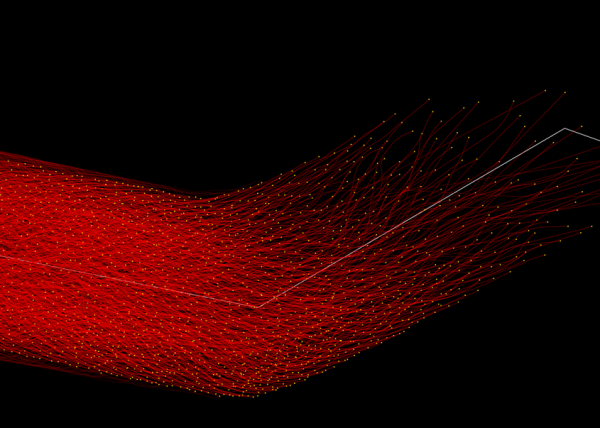
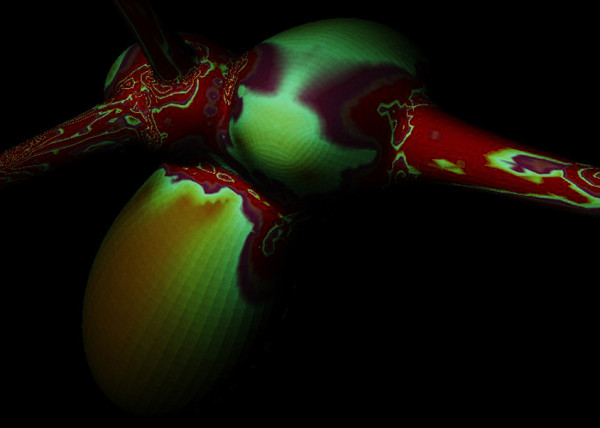
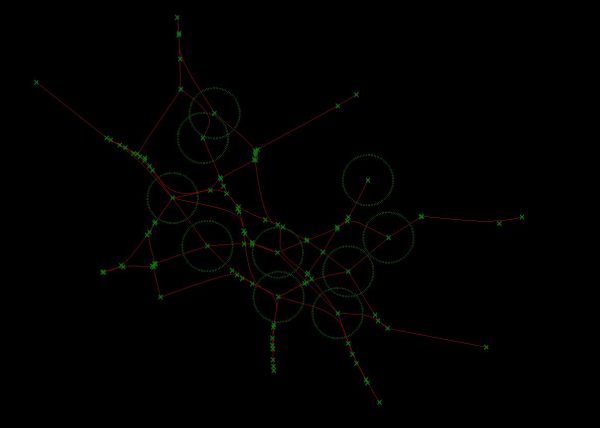
Of course this an simply an abstract example, however the idea here is that we can use any DATA, map it to geometry and use it to drive any attributes of an agents behavior. This example will show a static point “Home” which will evaluate its environment to determine where it’s “Next” position will be (the static state is only highlighting a single step in a dynamic system, these calculations would be implemented to every search for every step in its destination) – this method can be implemented in a wide variety of ways-I will only be sharing this sequence of development. The criteria are set up as CASES where each case contains a certain level of instruction. For this example, the possible “Next” positions are visualized as points in space containing RGB value for each possible next point. The current “Home” search position will be attempting to navigate towards DARKER colors determined by a user defined threshold – (ie R Value of 200) within the user defined Search Distance -The Search Bot tests against 4 Cases.
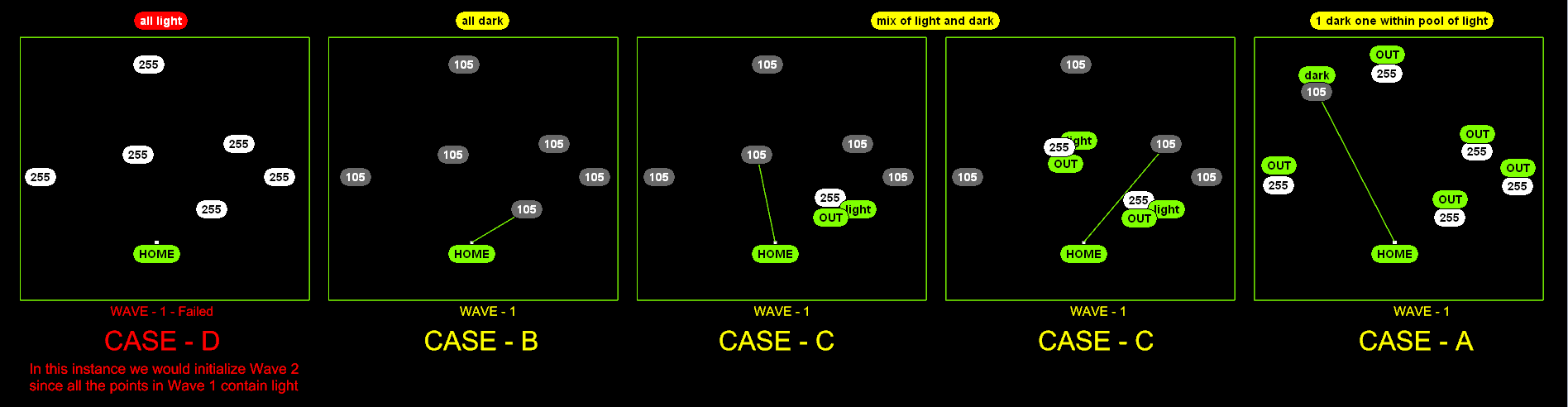
CASES-
.CASE A = Within the search space there is at least 1 point which contains DARK matter information within a mix of points containing LIGHT matter
.CASE B = Within the search space there is only points which contain DARK matter information
.CASE C = Within the search space there is at least 1 point which contains LIGHT matter information within a mix pf points containing DARK matter
.CASE D = Within the search space there is only points which contain LIGHT matter information
SEARCH SPACE-
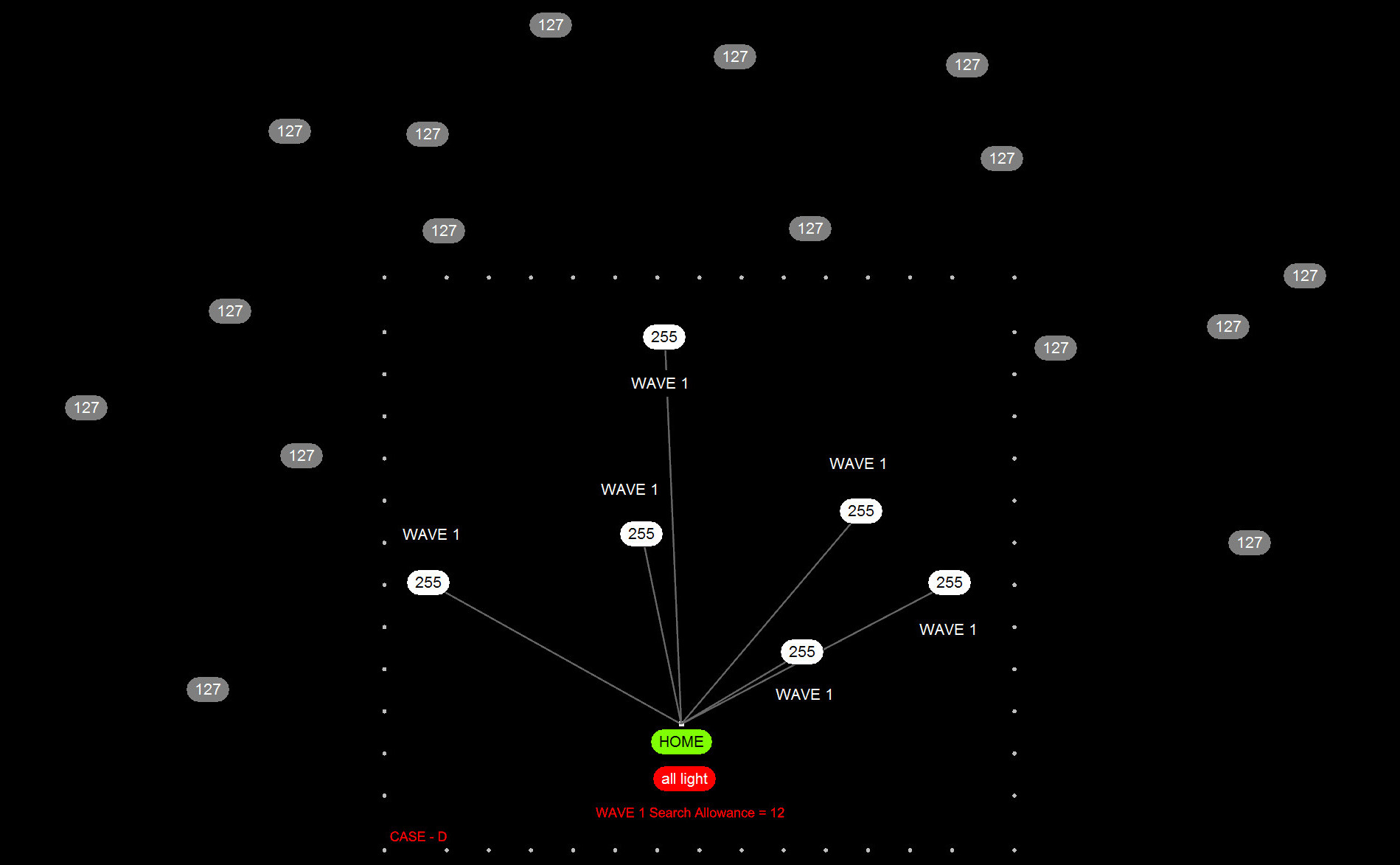
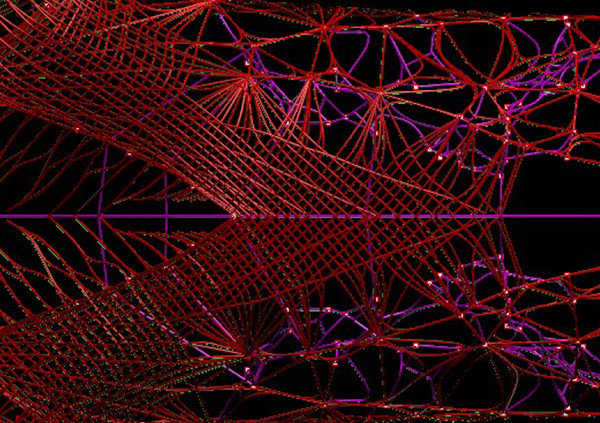
.Searches occur in WAVES – the initial wave is defined by a distance value which determined how far the current agent can see
.WAVE 1 = how far the current position is allowed to see
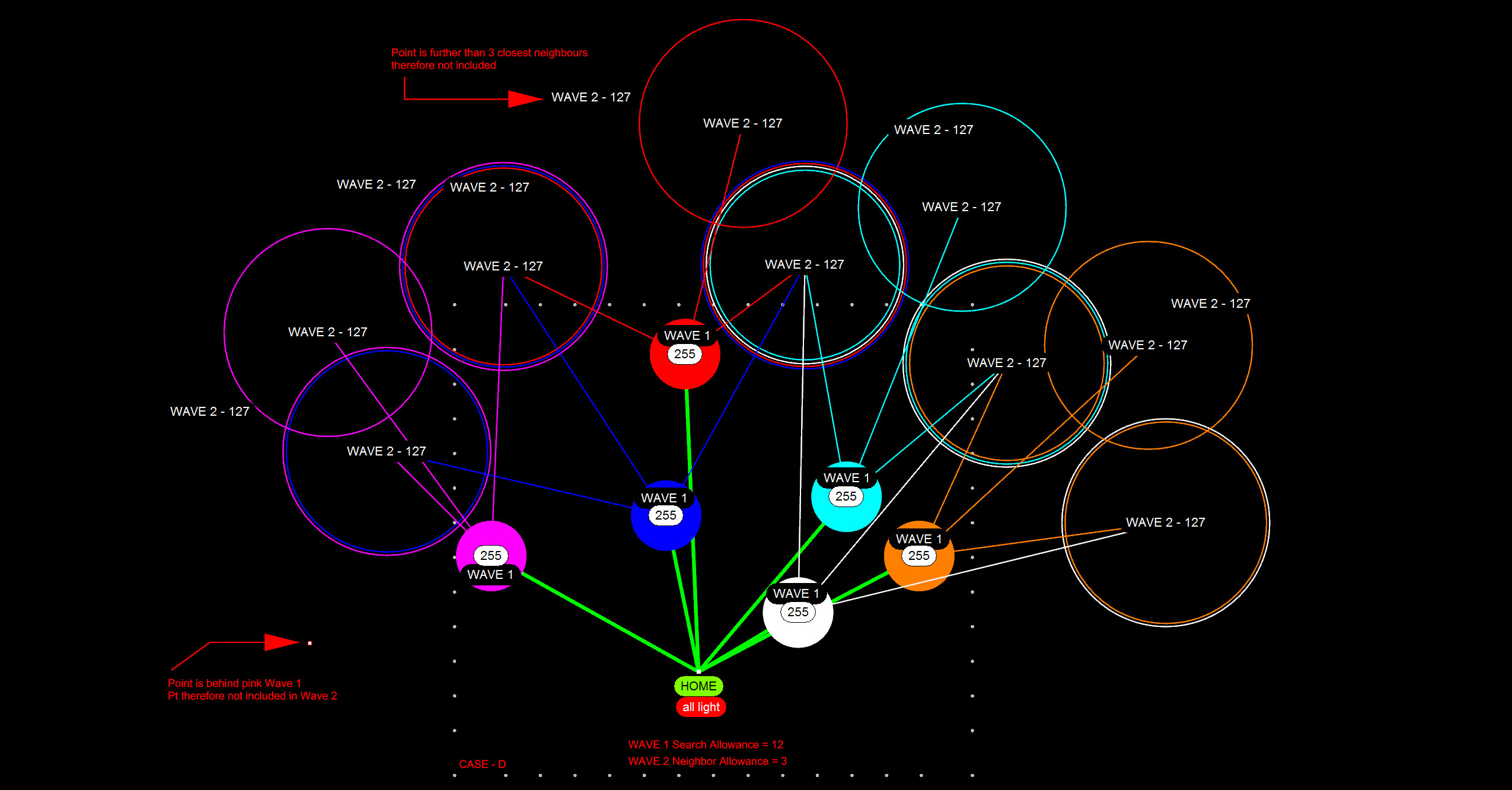
.WAVE 2 = a second wave only initialized if within the search space of WAVE 1 we do not find any potential points containing DARK matter, this new Search wave allows for each POINT in WAVE 1 to be given a Search allowance to attempt to see if any other points beyond them have any desired information. WAVE 2 can be controlled by specifying not only how far each WAVE 1 point can search but also how many neighbors information they are allowed to retain as well as if they are allowed to include their fellow WAVE 1 points in their search.
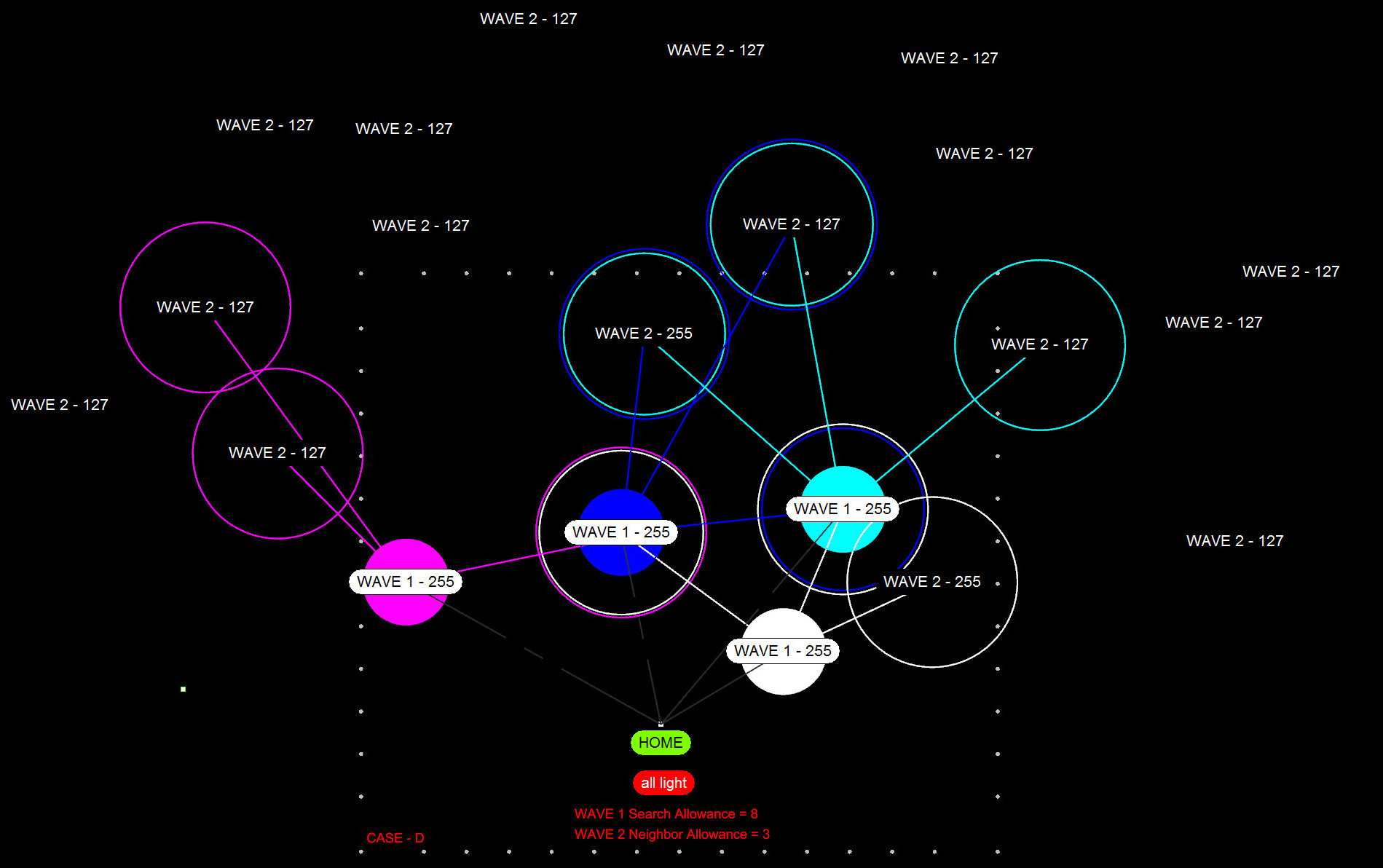
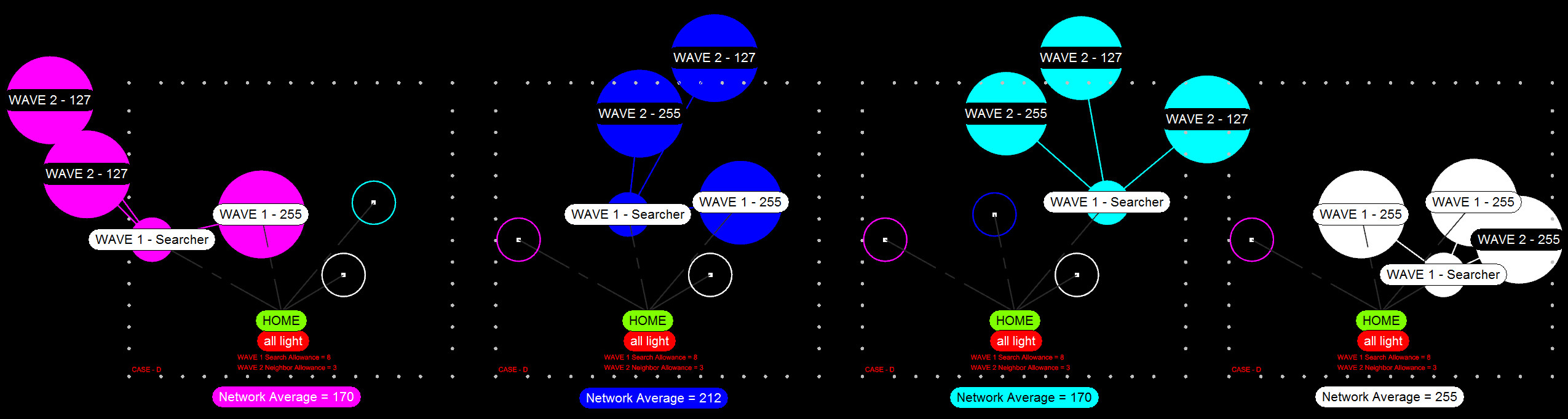
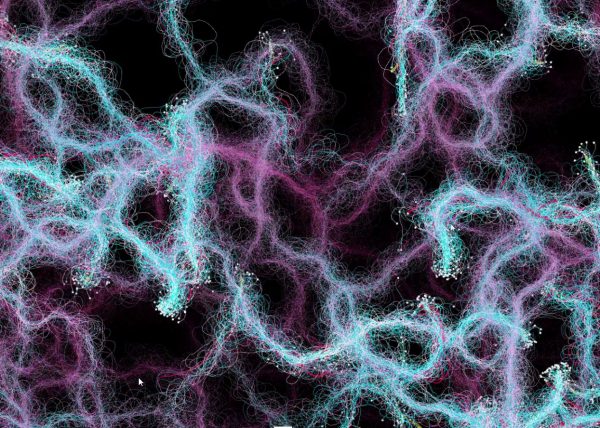
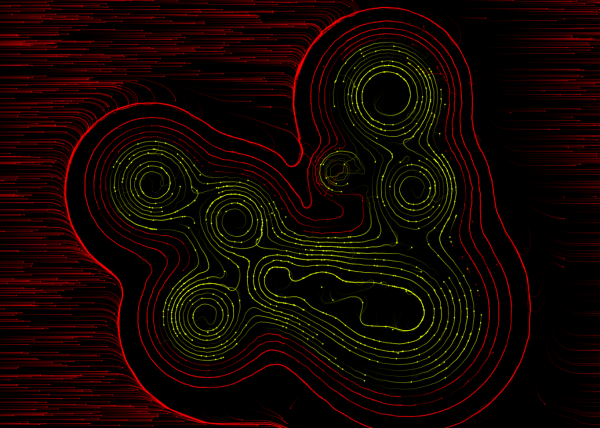
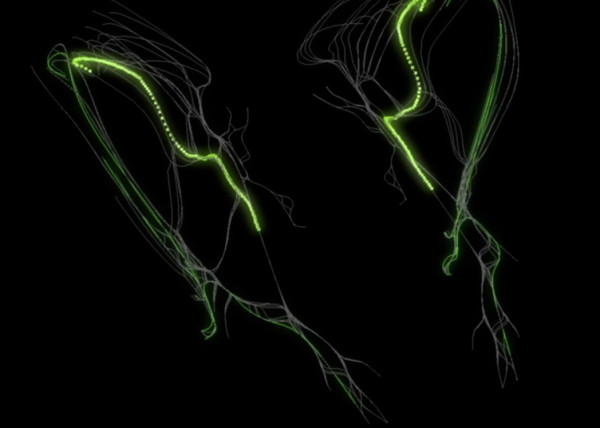
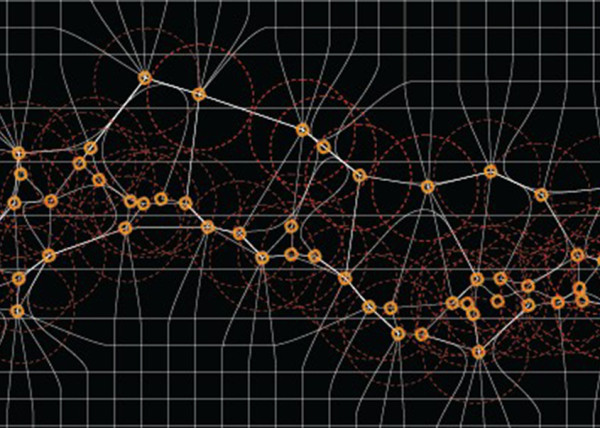
.DETERMINING NEXT SUITABLE POSITION = {enabled} Once each WAVE 1 neighbor samples the search space and stores the data, we simply average out the possible route alternatives and their color values to determine what will most likely lead towards DARK matter instead of light.
.EXAMPLE BELOW = {enabled} The CYAN and MAGENTA both average out to the same result, in this case the agent will go towards whichever one is closer, the CYAN one will be the next position.
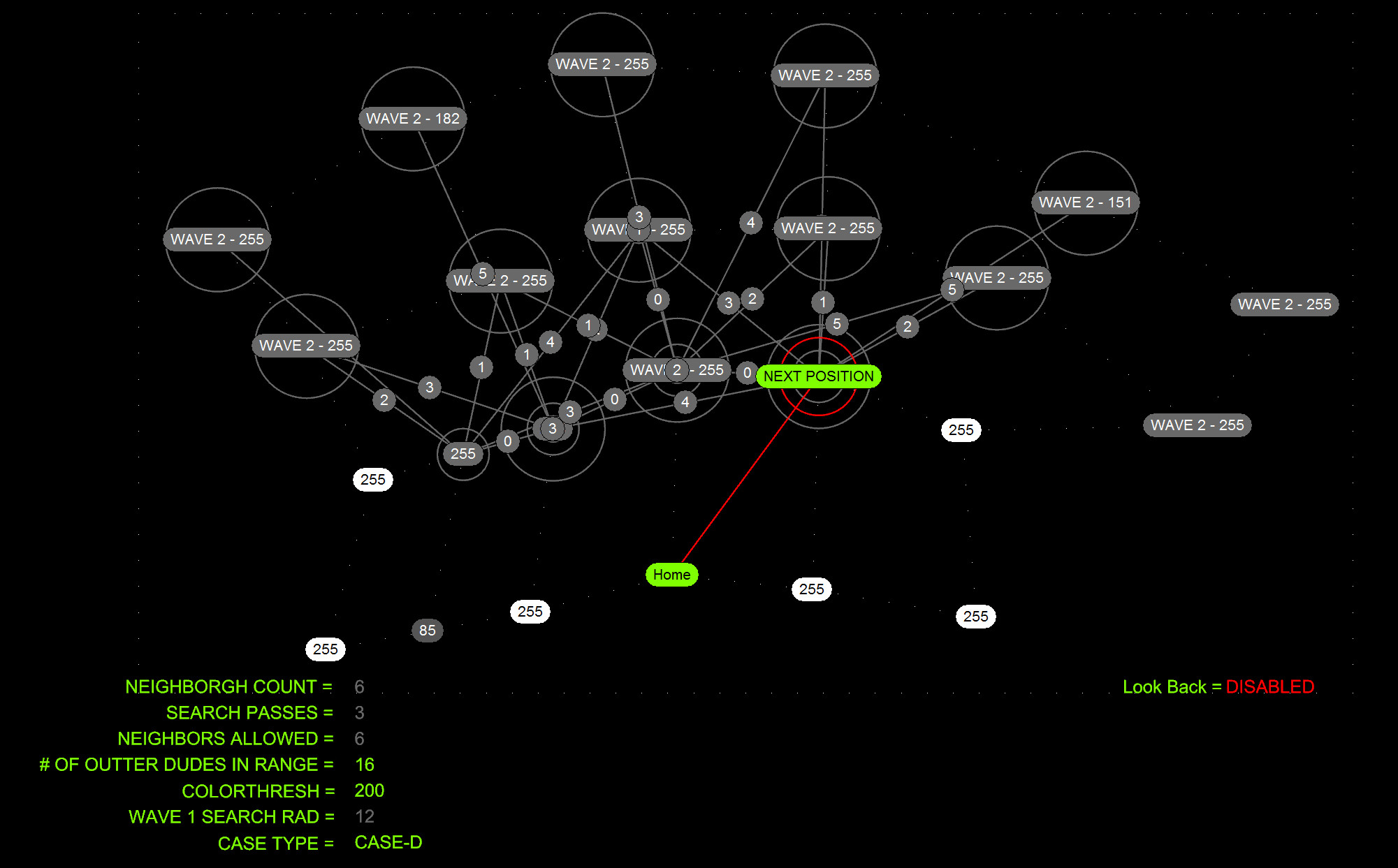
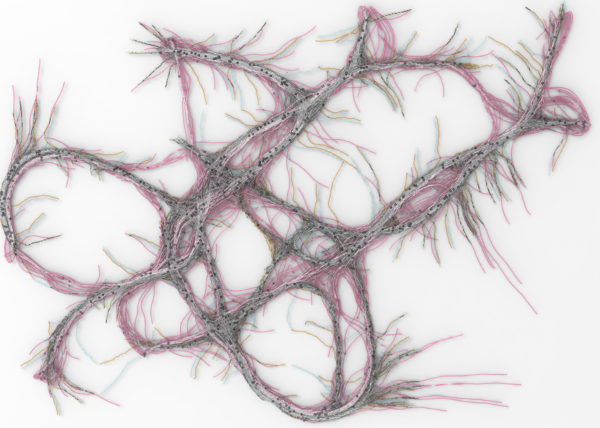
.REMOVAL OF WAVE 1 POSITIONS VS ALLOWING WAVE 2 TO ALSO SAMPLE IN WAVE 1 FOR HIGHER PRECISION = {disabled}
.EXAMPLE BELOW = In the example below we start with a higher WAVE 2 neighbor allowance as well as the removal of WAVE 1 positions, this will not allow WAVE 2 to include the WAVE 1 position data in the calculations.
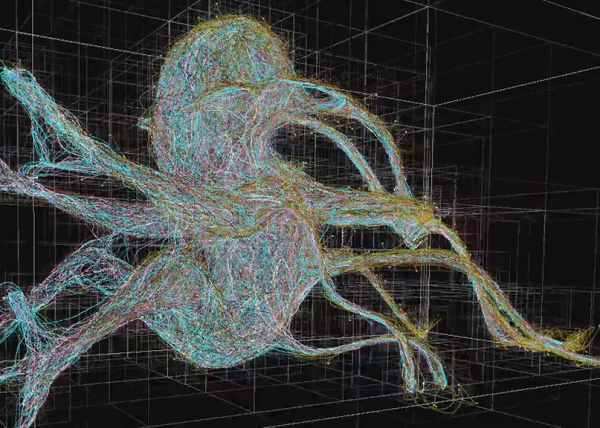
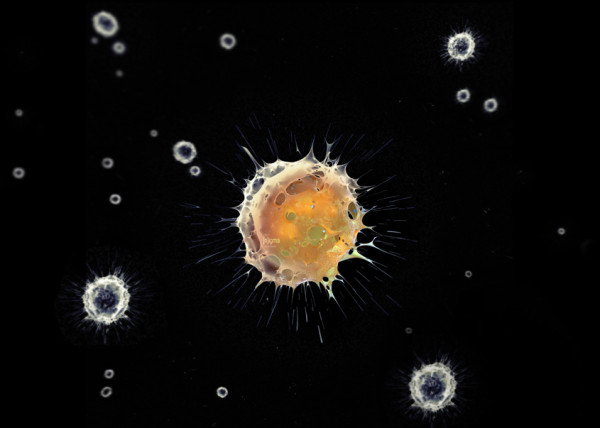
.ADAPTIVE SEARCH = {enabled} If the initial WAVE 2 neighbor count and search distance FAIL, the current search location is allowed to increment its vision and search passes allowed in order to search further, all the searched data is stored and the current position determines what the best next location is.
.EXAMPLE BELOW = Initially the allowable search was only 3 neighbors however since we did not find a suitable position to move, the current agent was allows to increment until it sampled all possible scenarios.
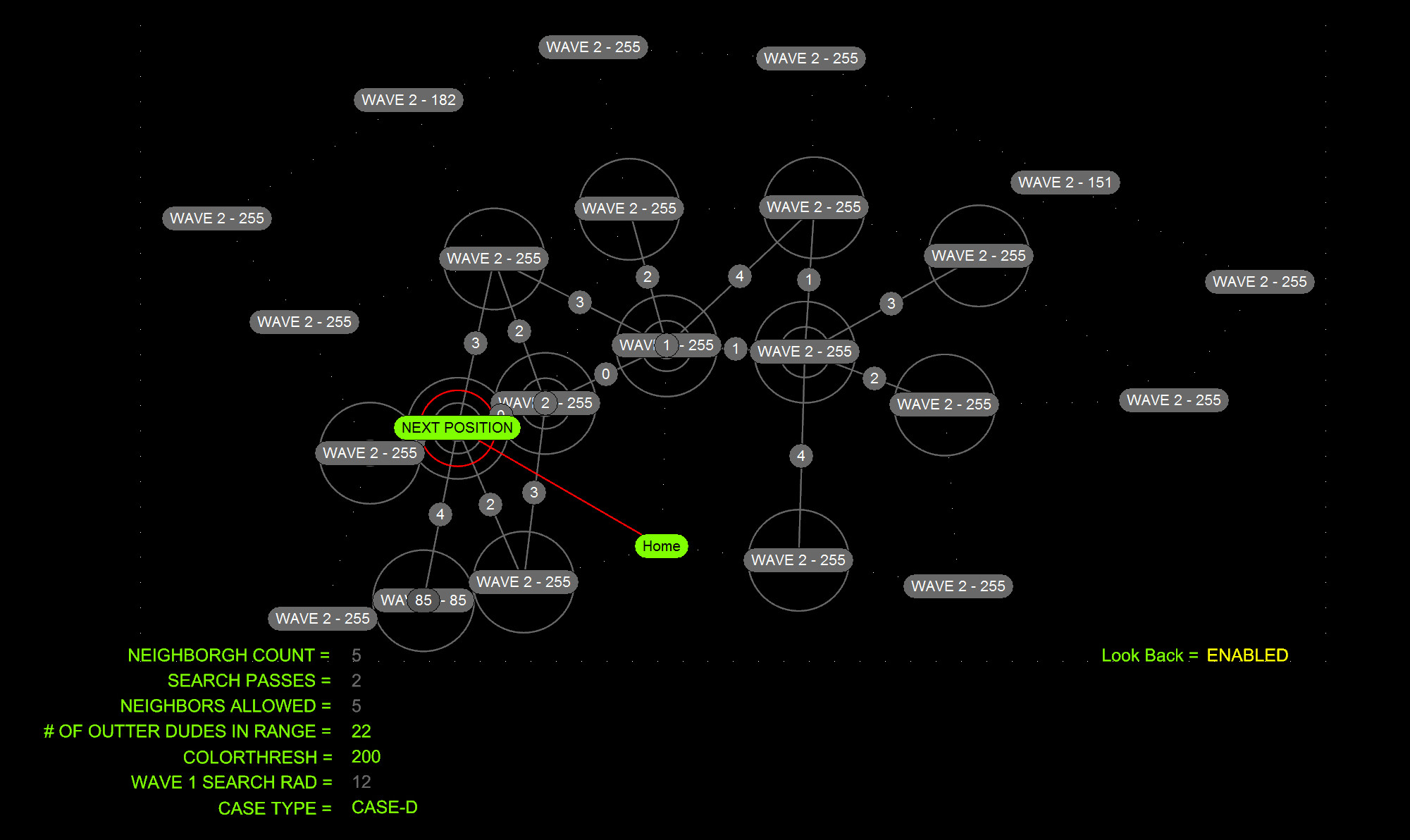
.SEARCH BACK = Search back instructs the current search if it is allowed to look behind its current position – this can be achieved by using the DOT product. If search back is enabled then the points behind the current search will be included in the search, otherwise the searching party can only move forward.
Recently in Portfolio
- [K]ernels

- Nike A.I.R Prototypes

- [A]nisochromatic Meshing
- Nike After Dark Tour

- PARAPRAXIS
- [001.HRR] CONCEPT BIKE

- 2040:LUNAR.OUTPOST[a]
- HE.6 2020 Prototype

- CULEBRA.NET

- PYTORCH-CLASSIFIER
- Nike Zoom Superfly Elite

- BENGBU CITY OPERA

- Nike Footscape Flyknit DM

- Jordan Hyperdunk React

- KA-HELMET

- [C]ucarachas
- [S]eeker
- [O]h Baby
- [E]l Papa
- [S]hatter.Brain

- [S]tigmergy
- [F]orces
- CULEBRA.JAVA

- [C]ulebra.MultiBehaviors
- [S]ticky Stuff
- [S]entinels
- [G]allopingTopiary
- RELUXOED

- [SRC] . Semi Rigid Car
- [P]erlin
- [E]ternal Wanderers
- [W]heelie
- [S]labacube
- [M]esh Crawlers

- [L]a Silla
- [3]D BabyMaking Trackstars
- [3]D Trackers
- [2]D BabyMaking Trackers
- [T]rackers
- CULEBRA GRASSHOPPER

- culebra.[M]eshCrawlers.3D

- culebra.[H]ybrid.3D

- culebra.[F]lorgy

- culebra.[F]ockers.3D
- culebra.[F]ockers.2D
- culebra.[N]oisey.3D

- [E]l Nino
- culebra.[S]elfOrg

- [D]rippin

- culebra.[N]oisey.2D

- [C]reepyCrawlers

- [J]eepresesCreepers
- [T]2000
- PUFFER PLEATNESS

- EMERGEN[CY]

- [L]iquified
- [S]uckedComp

- [X]plosion
- MR. EW

- [H]airGoo
- [B]alled
- [n]injaStars
- [b]loomer
- [t]rip city
- TAPE GUNNED
- [B]oom

- [M]iller Time
- [D]elamjam
- [B]rain Zapper
- [B]ig Bird
- [E]gg Tube Pavillion
- [A]llice’s Easter Tree
- [S]weet Honey
- [U]M.Urgent

- [t]oo.urgent
- [B]onnie..+..Clyde
- [B]io Mess
- [EL]Mojado.Virus
- [W]HAT the …!
- [H]ot Lava
- [P]leat Diddy
- [t]erminator easter egg
- Mr. BB
- [B]less You
- [F]antastic + Interactive
- [S]oo_Minimally_Pathed
- [P]uffer Fish.Fab
- [M]an Eater
- [AHH] Alien House Hunters

- [W]eave Machine
- Sportbike Racing

- Grappling

- Kart Racing

Leave a reply