Gallery details







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
PROJECT DETAILS
project : 2040:Lunar Outpost [a]
location : Cabeus Crater Moon
- PopularScience Choice Award – Popular Science
- Honorable Mention – EVOLO Skyscraper Competition – Evolo Magazine
PROJECT DESCRIPTION
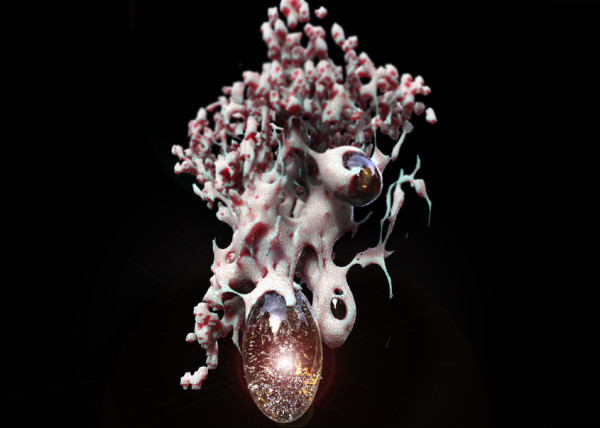
Moon Habitat: A Generative Case Study in Algorithmic Architecture :
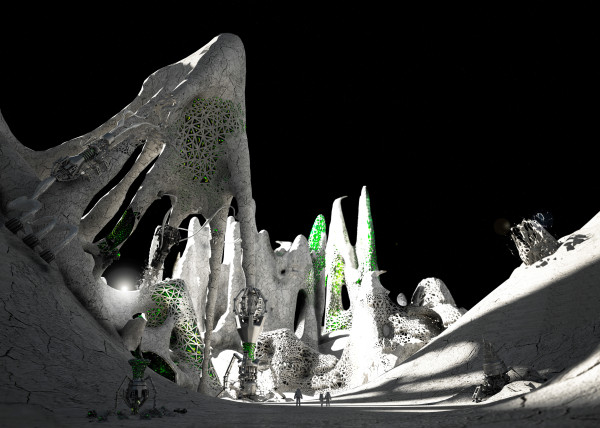
In response to NASA’s LCROSS mission confirming the presence of water on the Moon in 2009, this project proposes a speculative but technically grounded lunar habitat. The design reconsiders the typology of a skyscraper—not as an Earth-bound structure, but as a vertically nested settlement embedded within the Shackleton Crater Rim at the Moon’s South Pole.
Departing from terrestrial constraints like gravity, atmosphere, and weather systems, this project leverages the Moon’s unique conditions to explore an architecture that could only exist in such an environment. Key to the concept is the use of regenerative fuel cells, where water is split via electrolysis into oxygen for breathable air and hydrogen for fuel—establishing a self-sustaining system essential for long-term habitation.
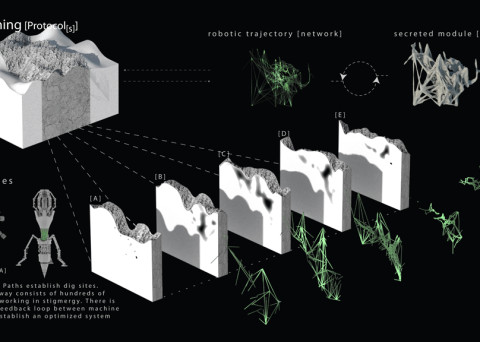
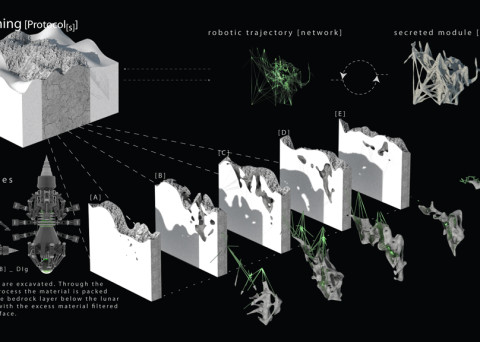
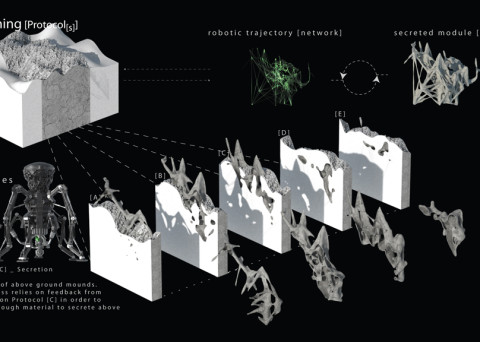
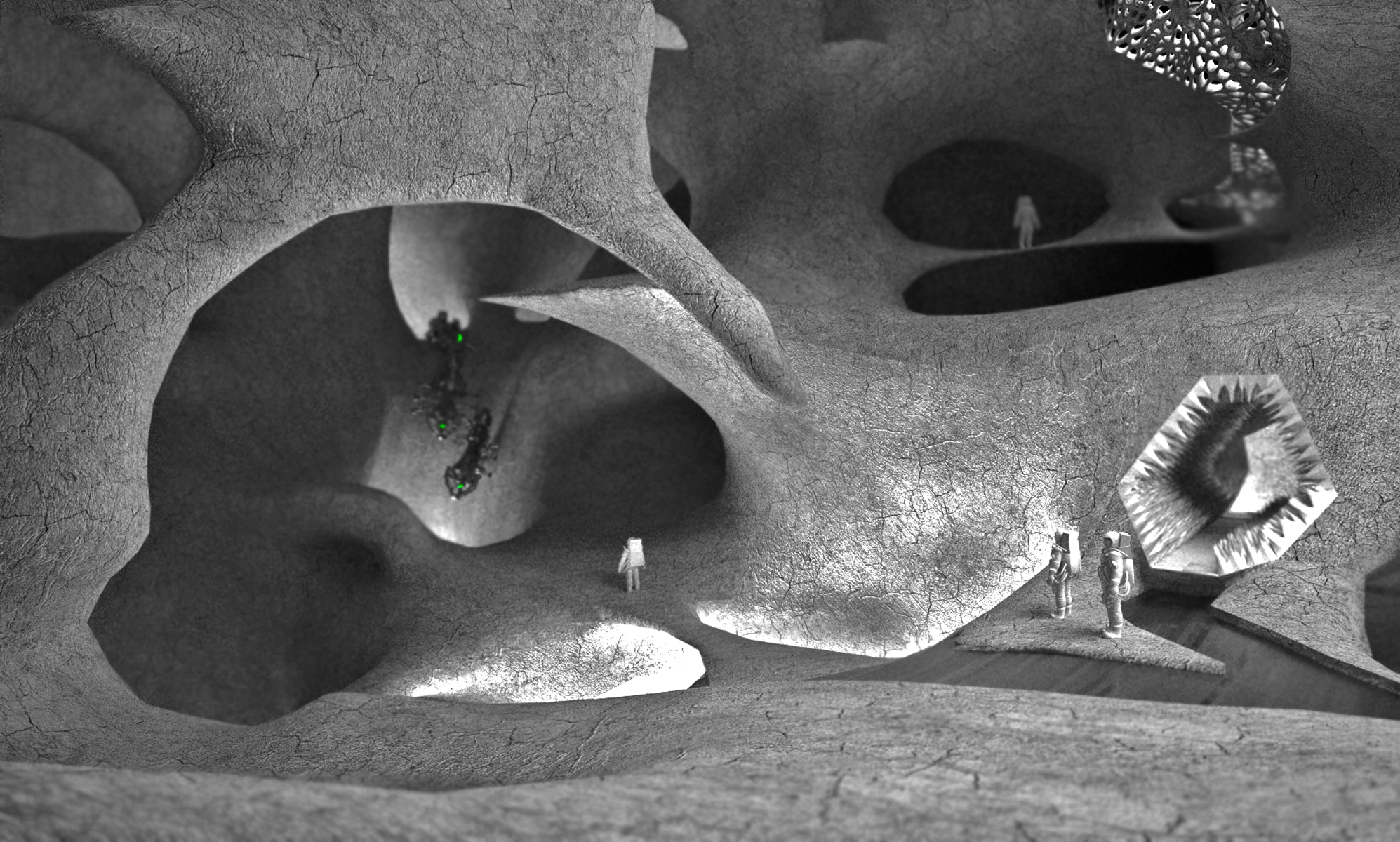
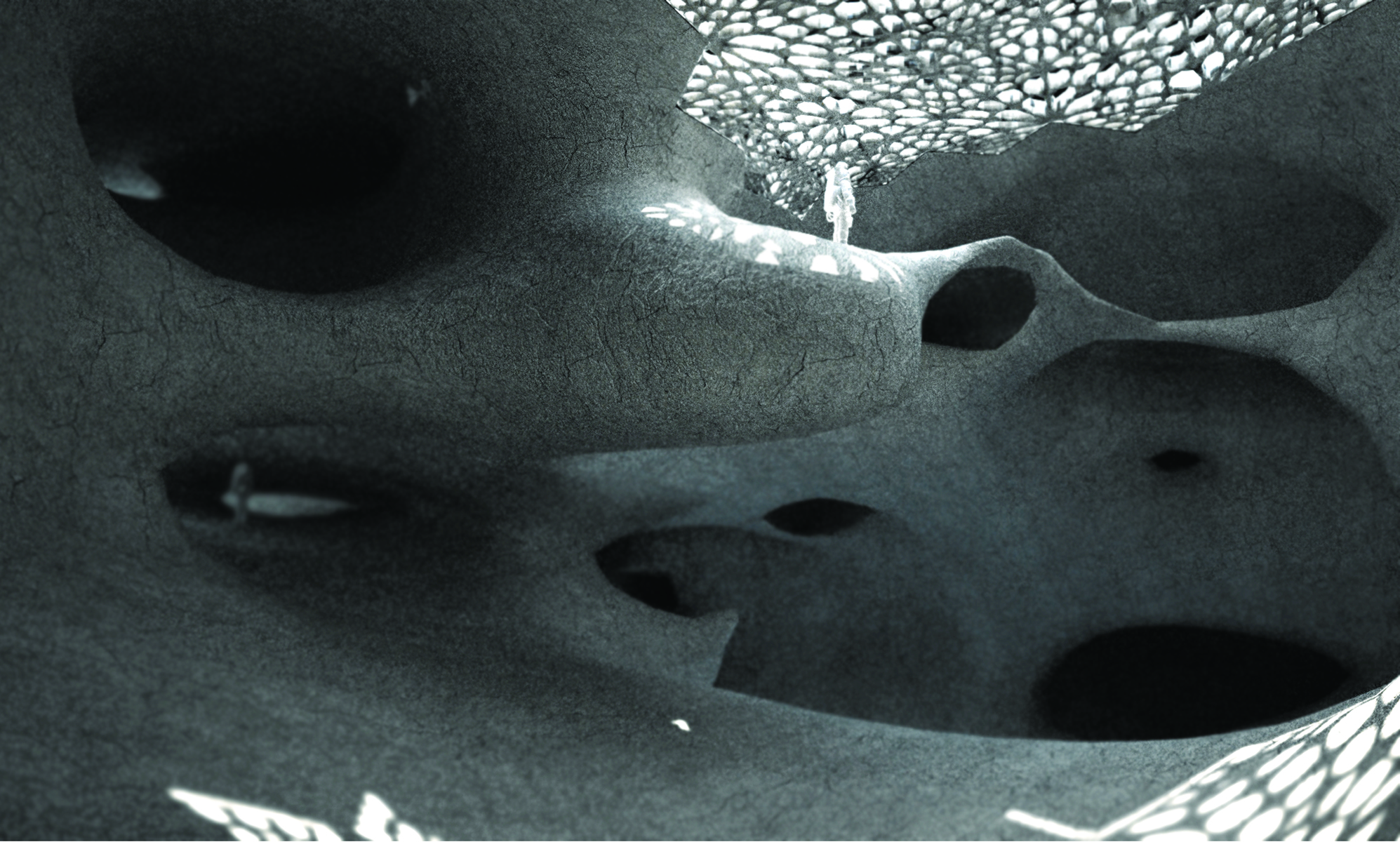
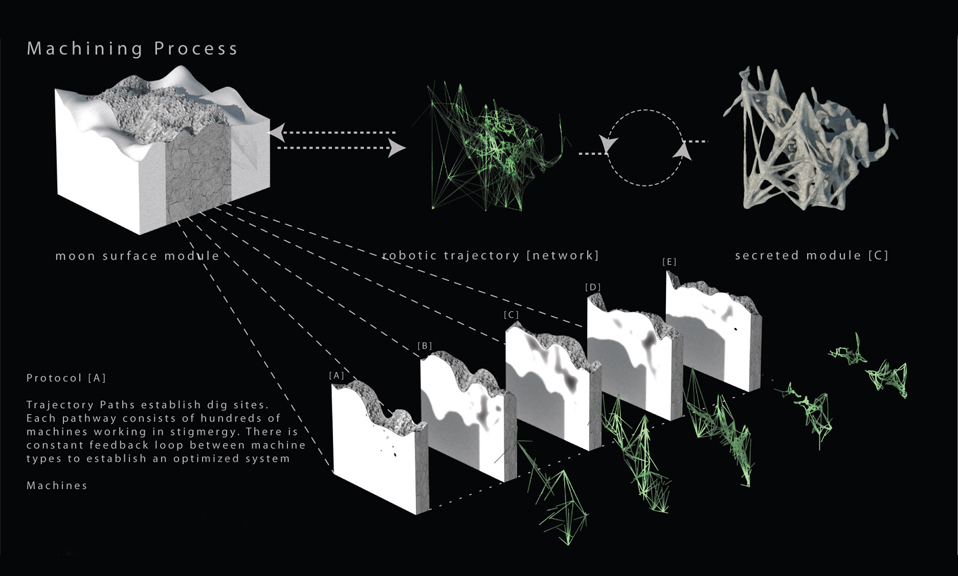
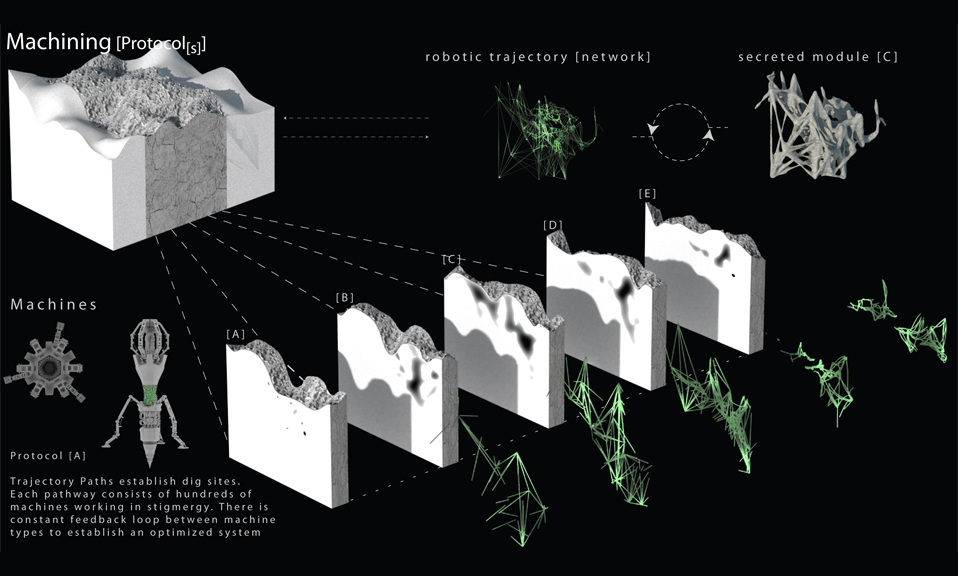
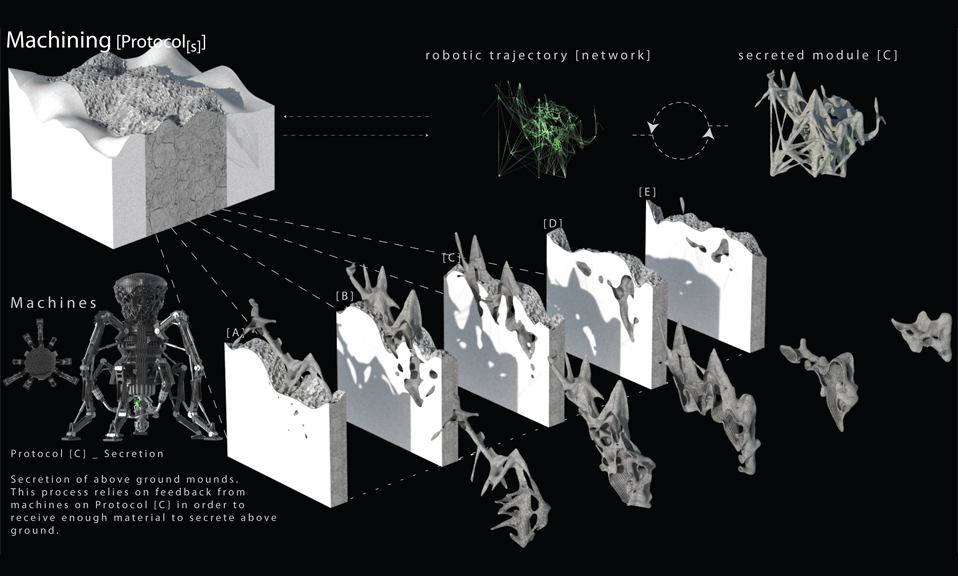
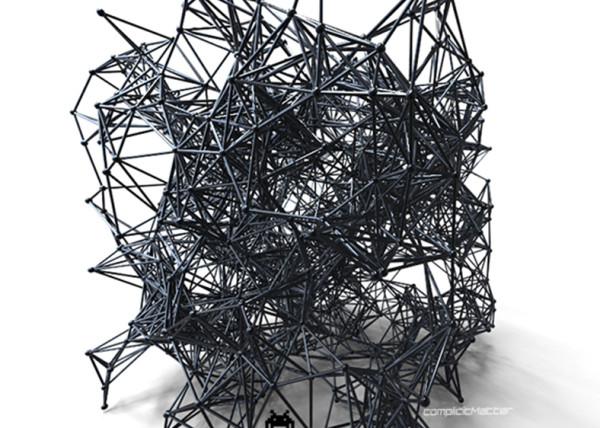
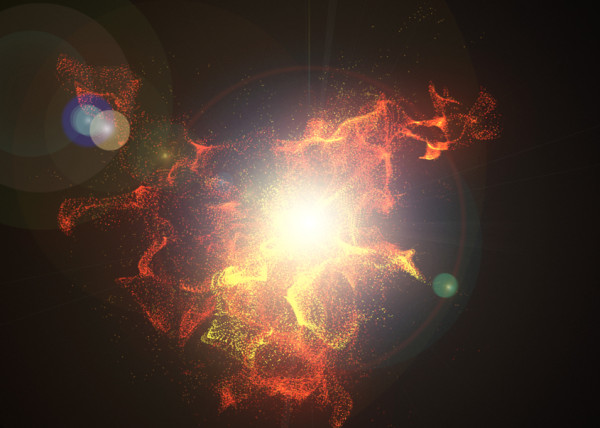
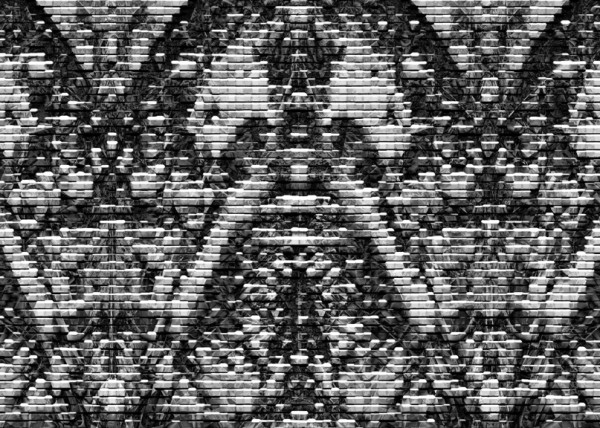
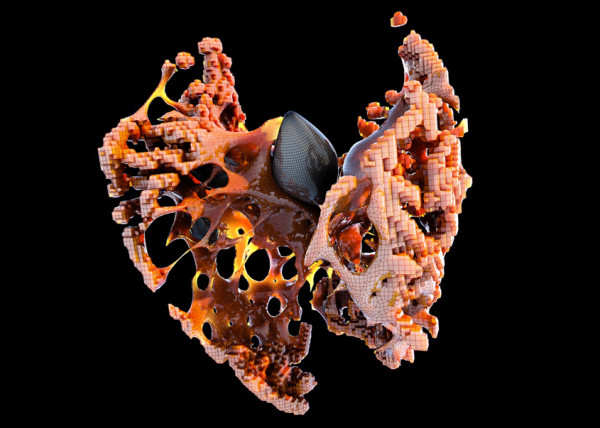
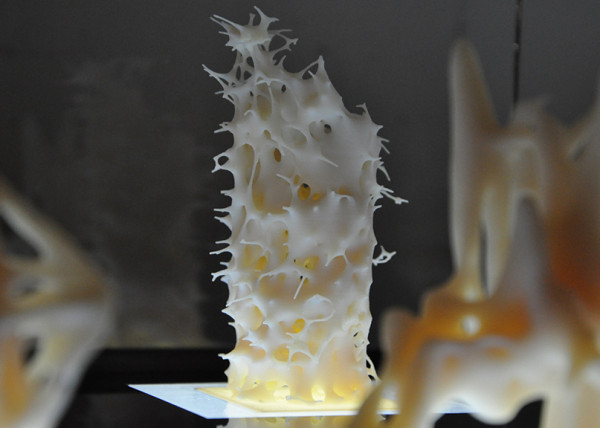
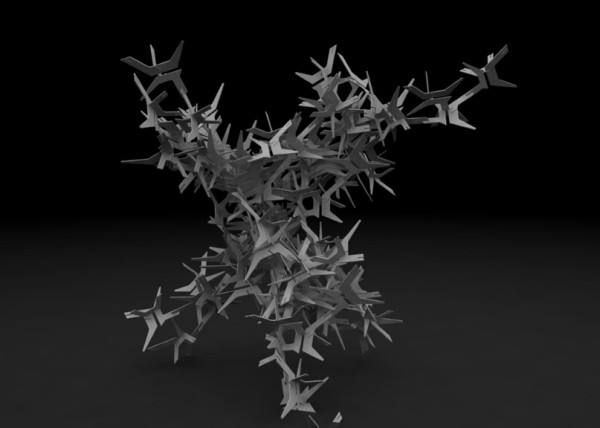
The project is phased across a 60+ year timeline, with the first two decades focused on pre-human occupation and construction. A swarm of autonomous nano-robots is deployed to the nearby Cabeus Crater, where they begin excavation and self-assembly using stigmergic behavior—a decentralized method of building observed in termite and ant colonies. The robots operate based on agent-based, non-linear systems, using simple local rules to generate complex emergent structures. Dug regolith becomes the material for constructing protective dunes and vertical towers—shielding future inhabitants from radiation, micro-meteorites, and extreme thermal fluctuations.
These embedded towers grow downward and outward, connected by an evolving network of subterranean systems. As the population grows, the architecture responds: feedback loops within the behavioral system allow the structure to scale organically, adapting infrastructure in response to environmental and human-driven variables. The goal isn’t to mimic Earth’s cities, but to prototype a new logic for settlement beyond our planet.
This project was also a provocation during a pivotal time in architectural discourse—when generative and algorithmic design were met with skepticism. Critics argued that computers might overtake authorship, eroding design intent. This work challenged that narrative, demonstrating that code could be used as a creative medium, not a replacement for it. The result is not a form generated by machines, but a system encoded with intent, behavior, and authorship.
Design & Concept by Luis Quinones
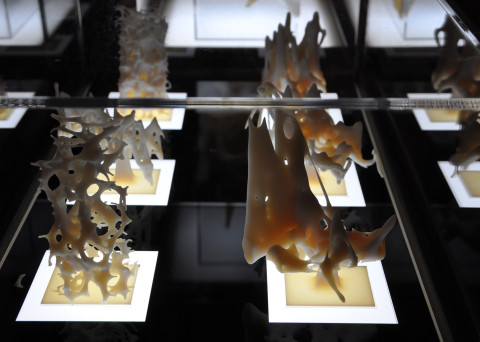
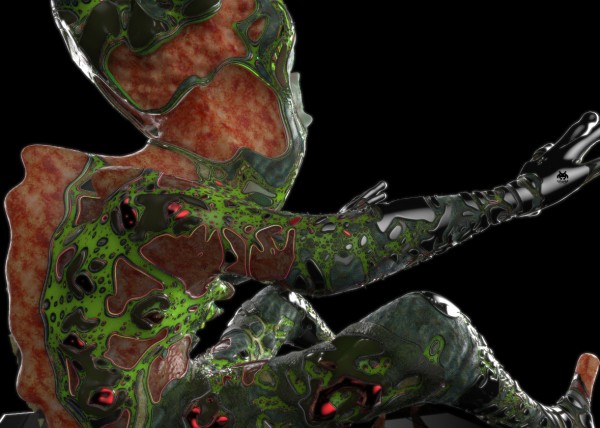
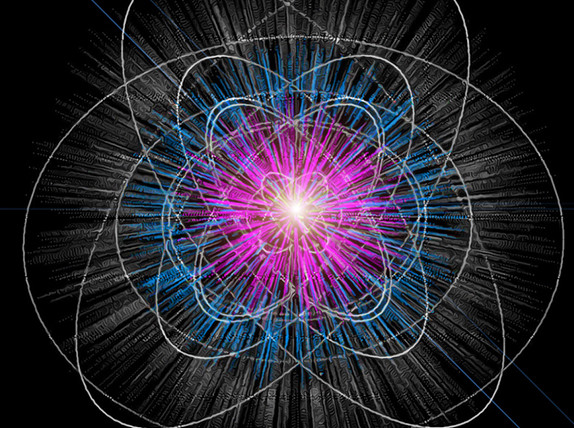
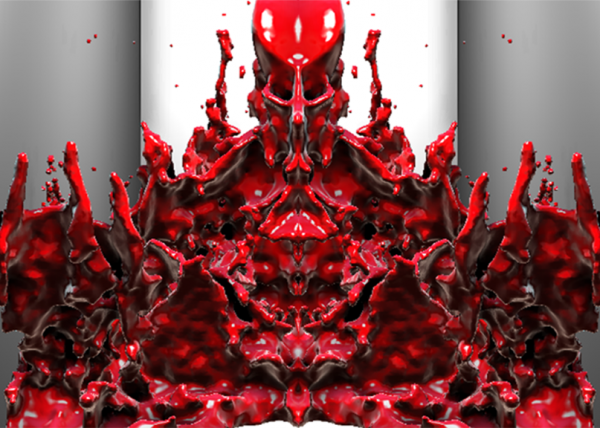
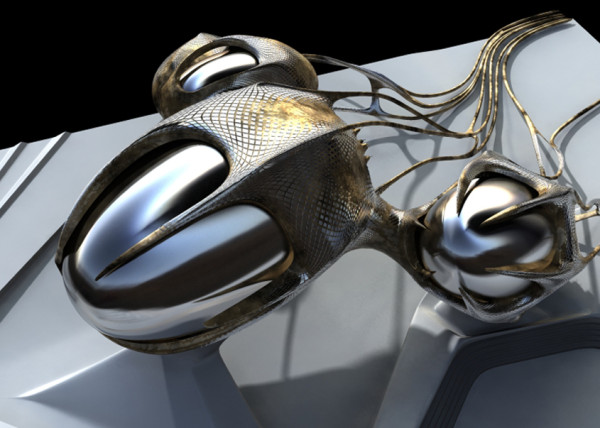
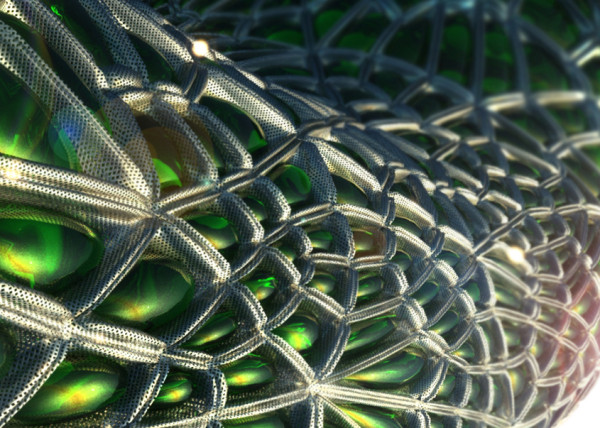
Closed-Loop Energy System: Regenerative Fuel Cells for Lunar Habitation :
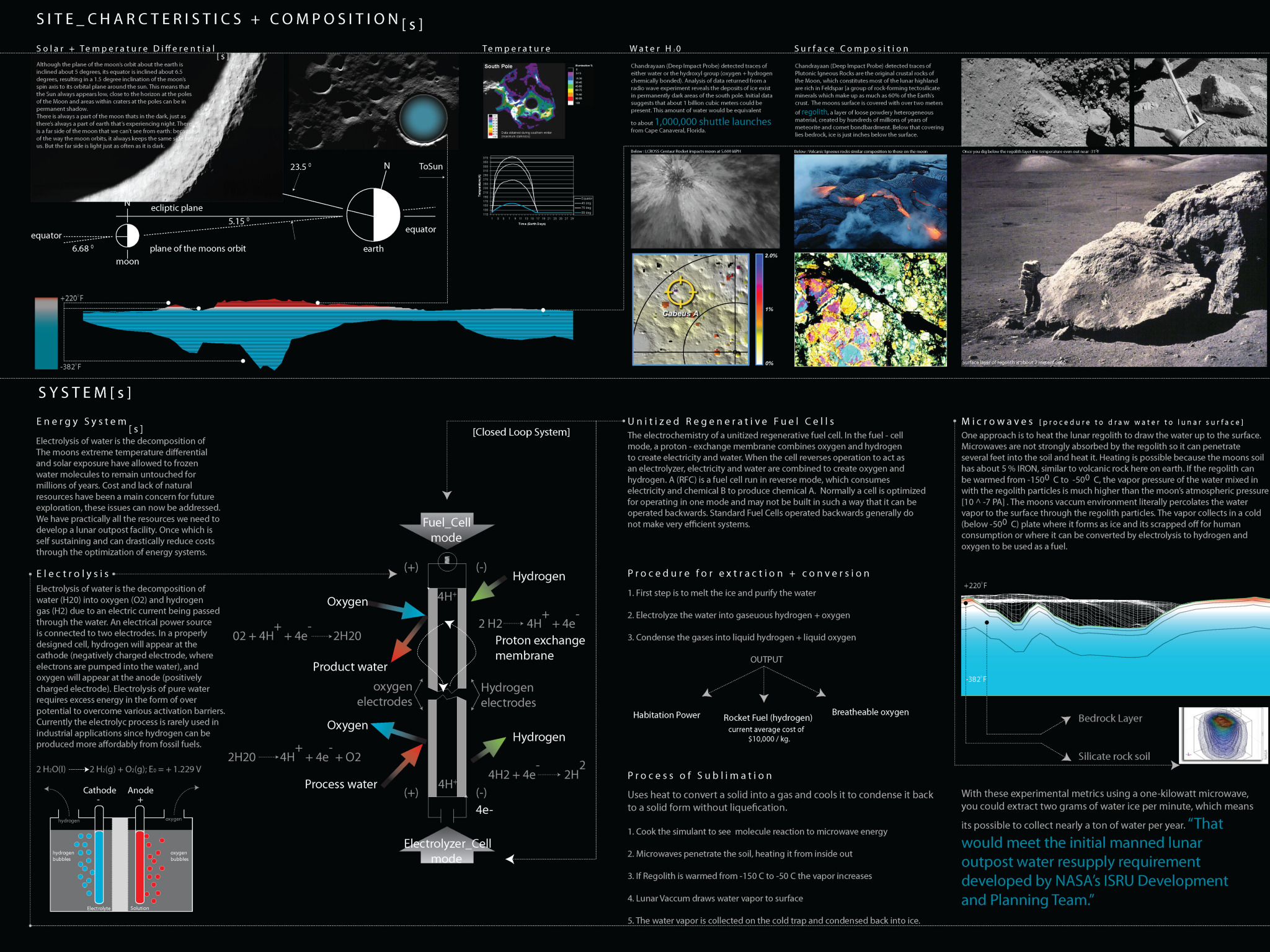
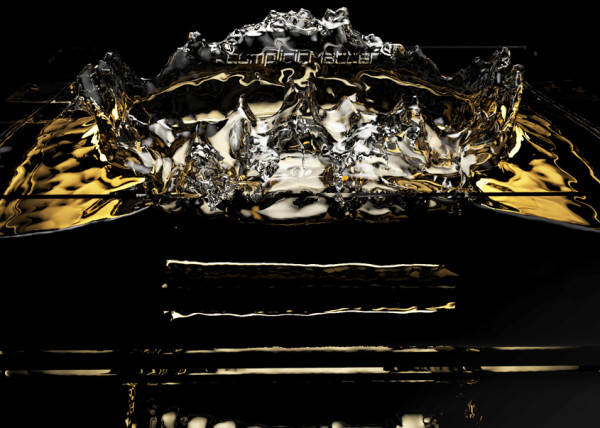
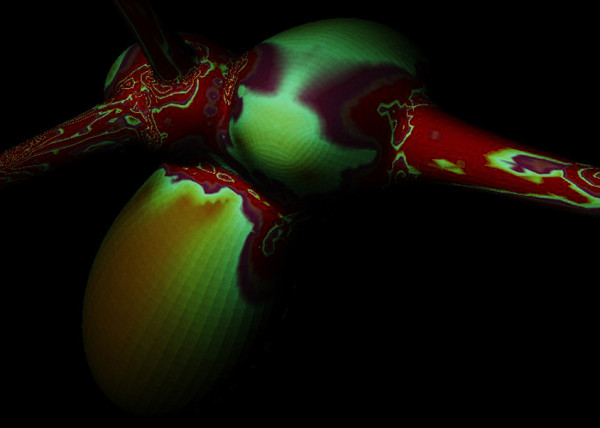
The foundation of this lunar habitat concept lies in the development of a closed-loop energy system based on unitized regenerative fuel cell technology. This system is designed to sustain human life and support long-term exploration by harnessing lunar water as both a source of breathable oxygen and rocket fuel. Following the discovery of water ice on the Moon by NASA’s LCROSS mission in 2009, the design proposes a strategy for extraction, electrolysis, and storage of water-derived resources. The architecture of the system is deeply integrated with site-specific environmental conditions—taking advantage of the Moon’s temperature extremes, lack of weather, and direct solar exposure. At the heart of this system is a fuel cell that can operate in reverse. In electrolyzer mode, it splits water into hydrogen and oxygen using solar-generated electricity. The hydrogen can be liquefied and stored as fuel, while oxygen becomes a source of life support within the habitat. In fuel cell mode, the system recombines hydrogen and oxygen to generate electricity and water, creating a sustainable energy feedback loop.
This approach removes the need for constant resource imports from Earth. The electrochemical process is supported by a network of robotic systems that mine ice from subsurface reserves using microwave sublimation, heat, and vacuum-based collection techniques. Combined, this enables a self-sufficient, embedded vertical habitat—one that grows in stages and is capable of supporting life in an otherwise inhospitable environment.
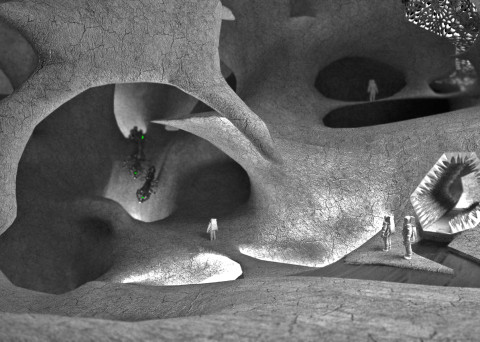
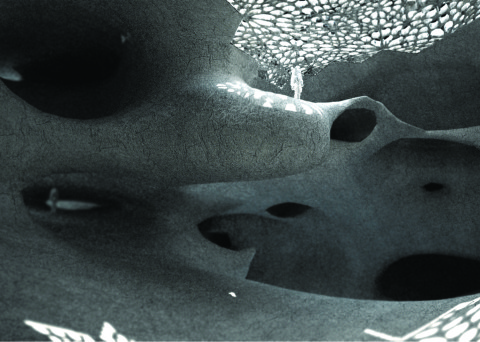
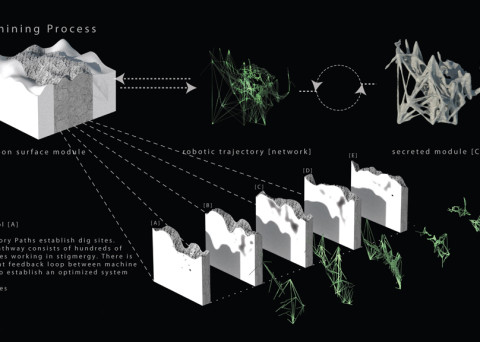
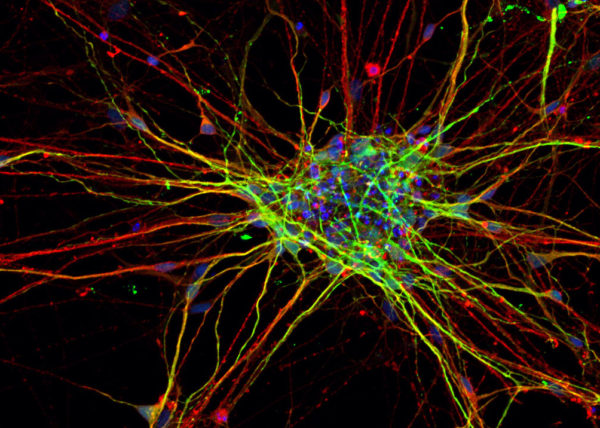
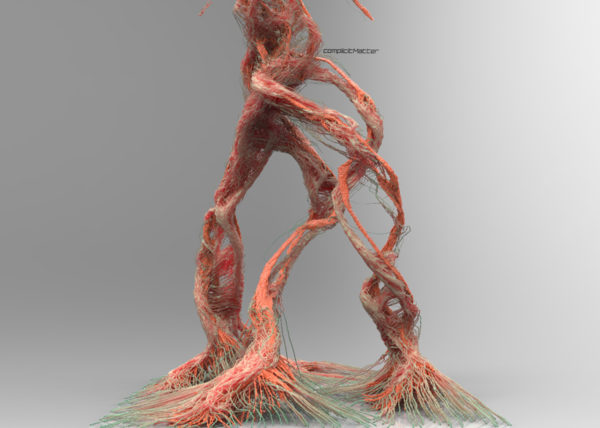
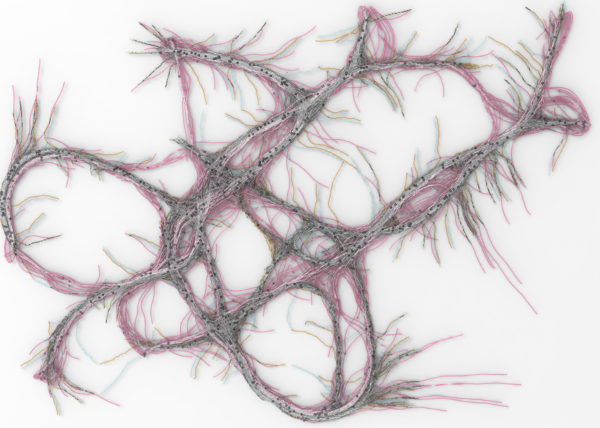
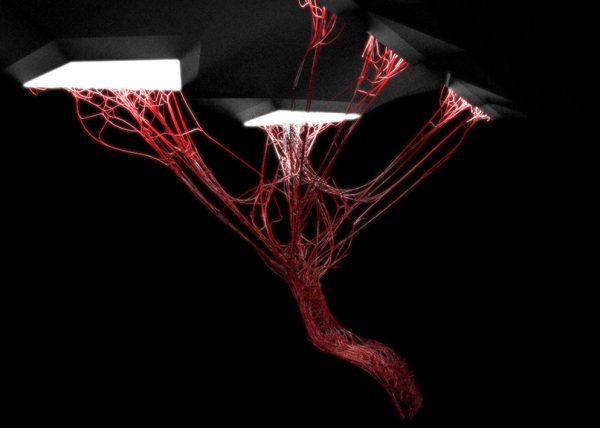
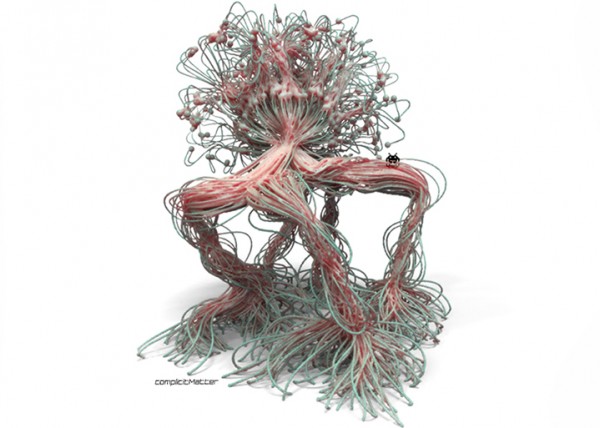
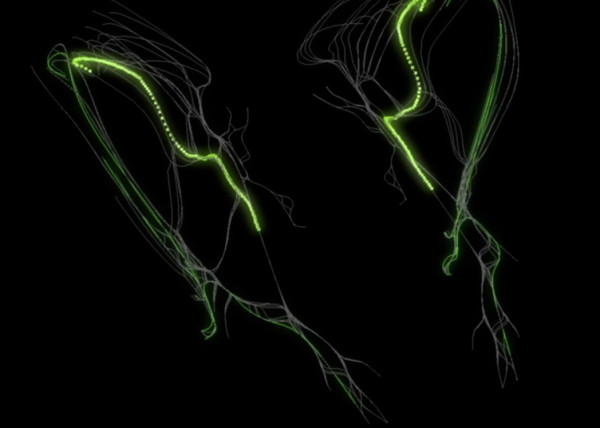
Behavioral Systems: Agent Networks and Self-Organizing Construction :
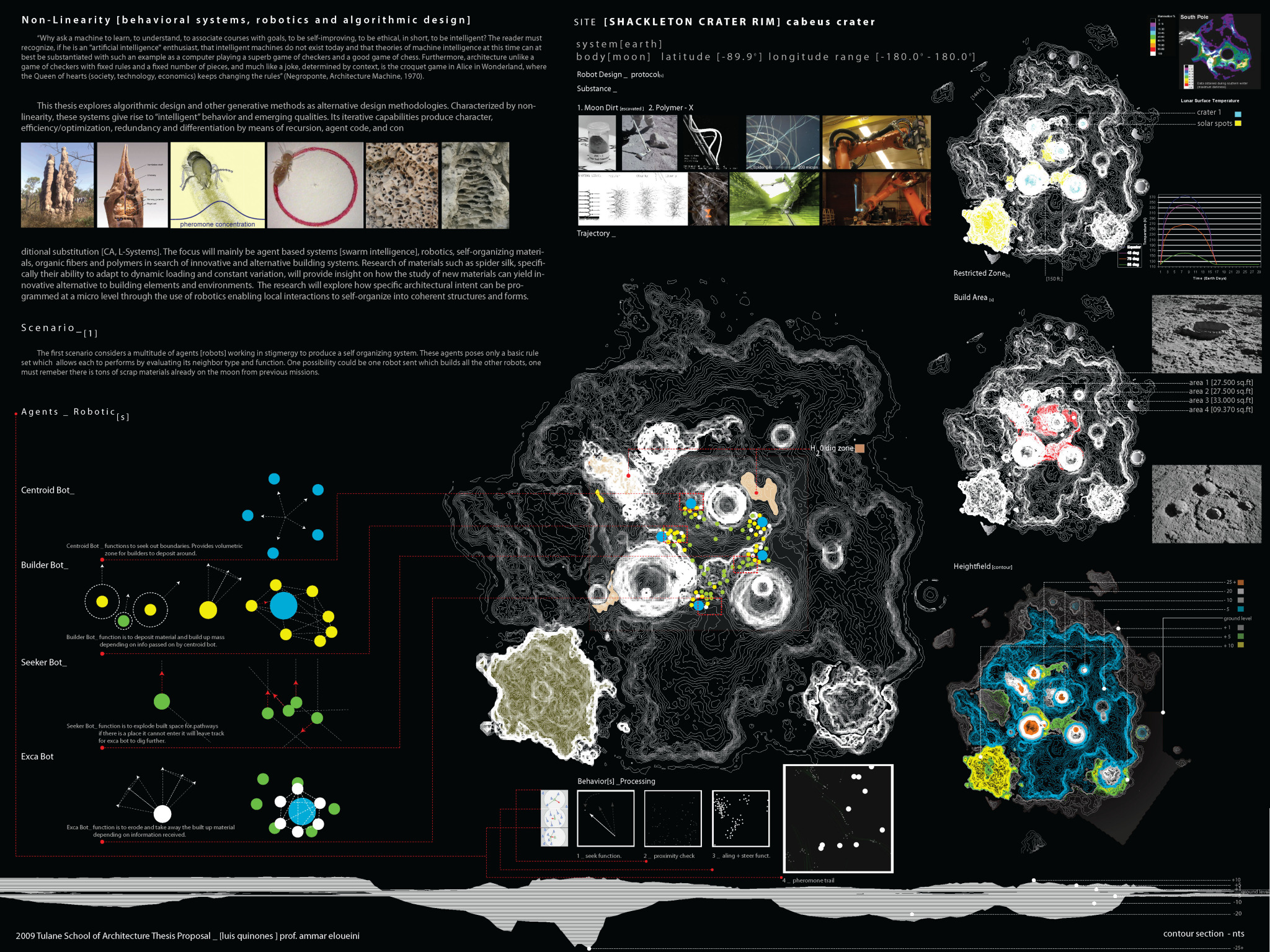
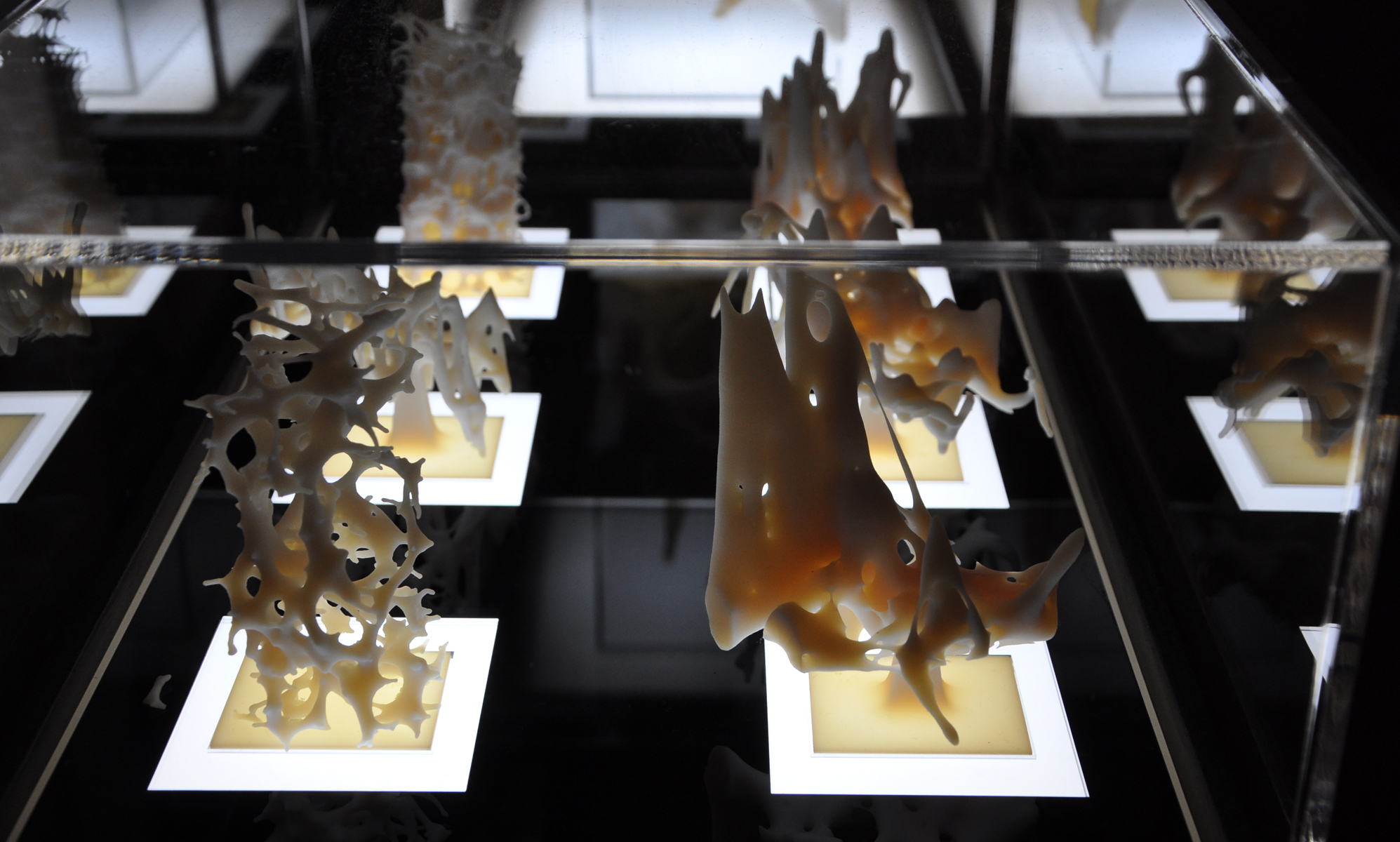
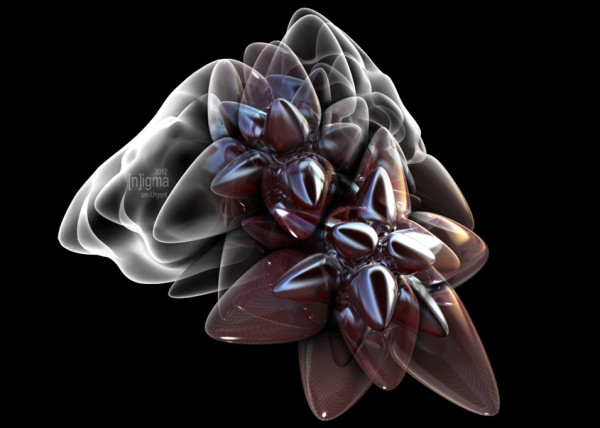
This board introduces the foundational systems for the lunar settlement, outlining both the site conditions and the behavioral logic of the agents (robots) involved in the construction process. Shackleton Crater and the nearby Cabeus Crater were selected due to their high concentrations of frozen water and consistent solar exposure—essential resources for long-term survival and energy harvesting. The proposal departs from traditional top-down planning by defining a stigmergic system of bottom-up, behavior-driven construction. A series of distinct robotic agents (Centroid, Builder, Seeker, and Exca Bots) operate within a decentralized framework to excavate material, assess proximity, and build based on a minimal set of rules. These bots work collectively to form emergent structures through localized interactions, mimicking colony behavior found in termites and other eusocial species. In doing so, the proposal engages algorithmic design not as an aesthetic choice, but as a means to encode behavior and spatial intelligence—allowing design to emerge from interaction rather than be imposed externally.
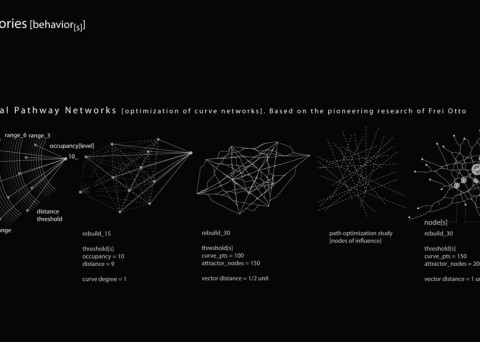
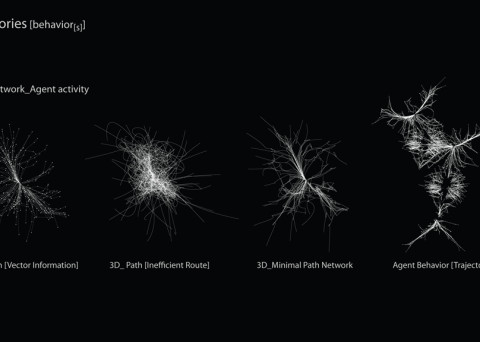
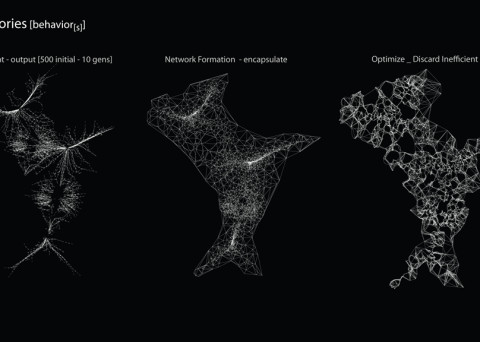
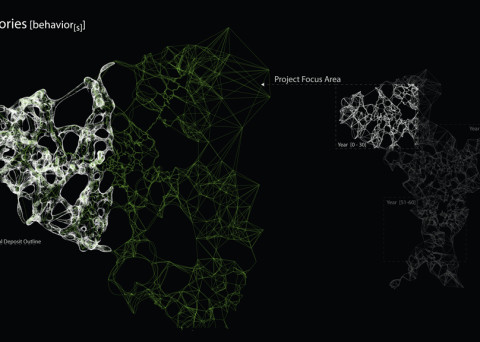
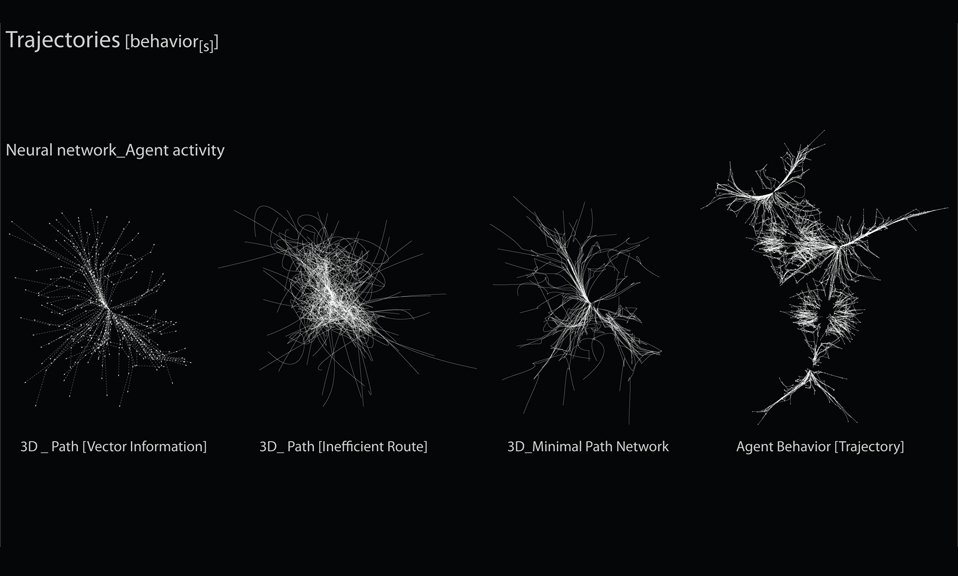
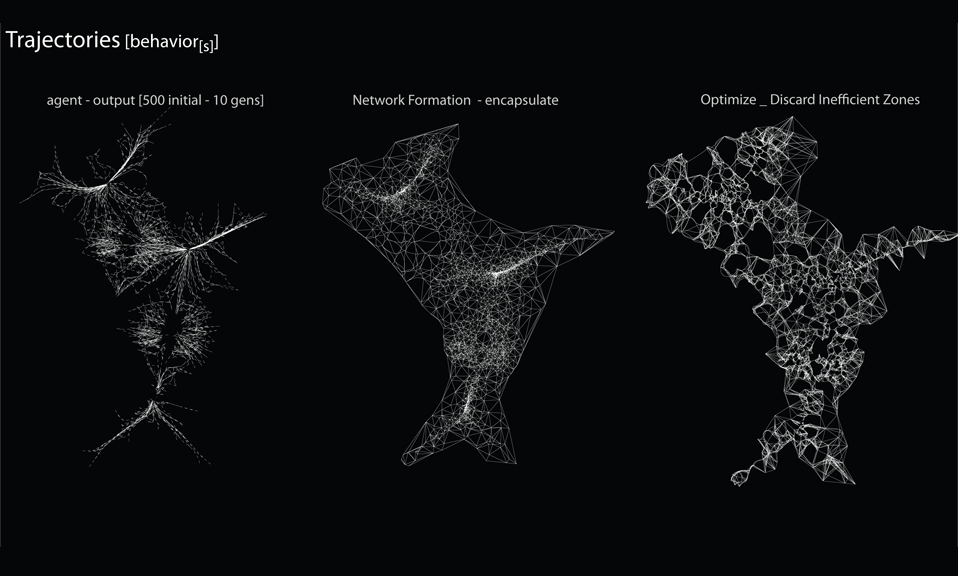
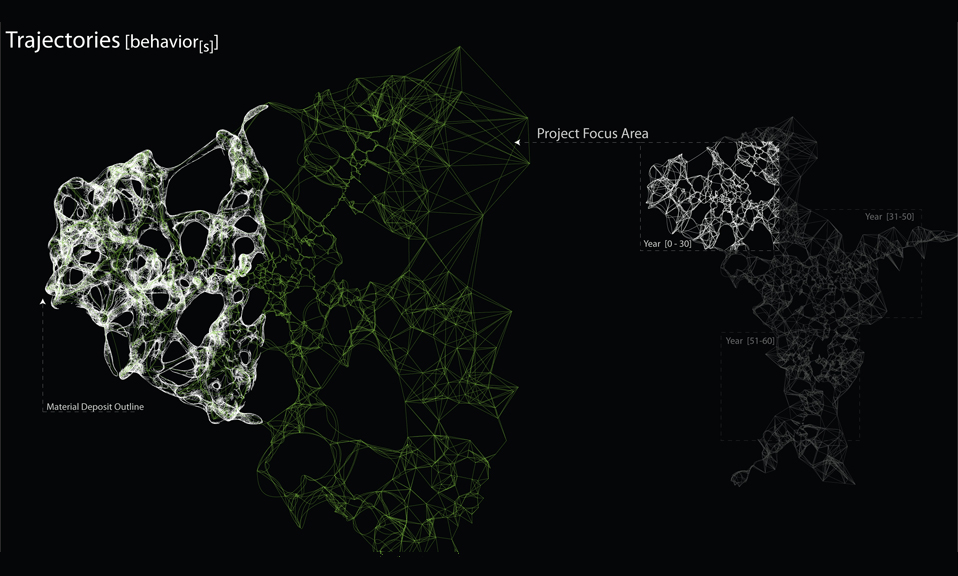
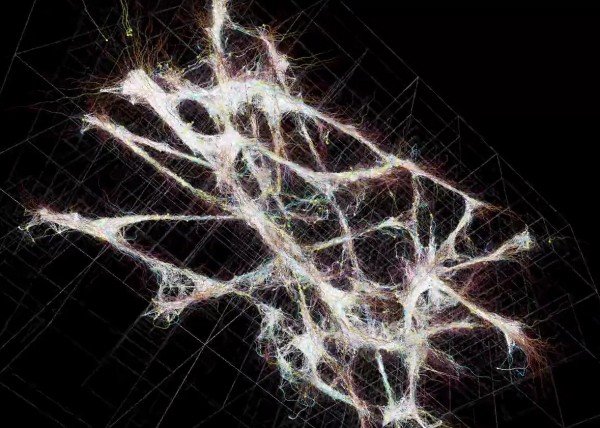
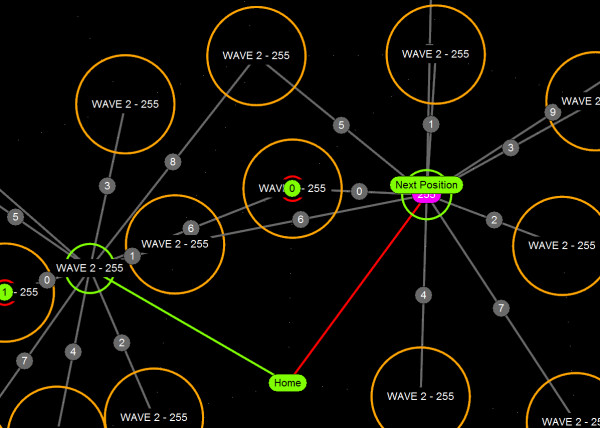
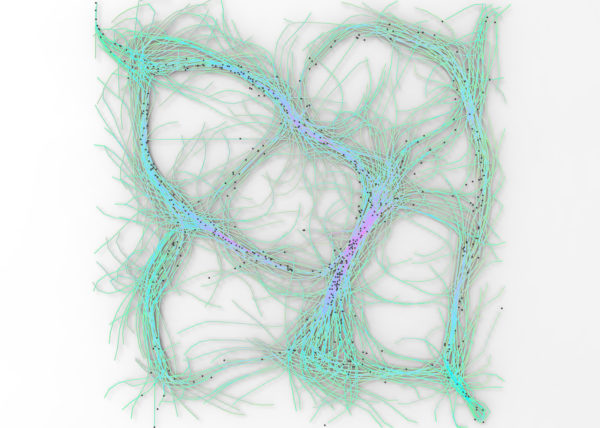
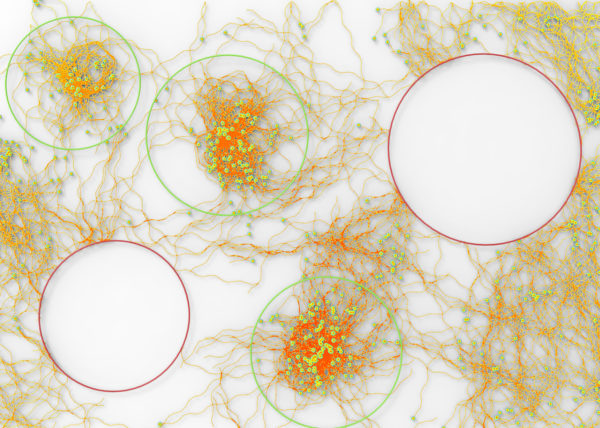
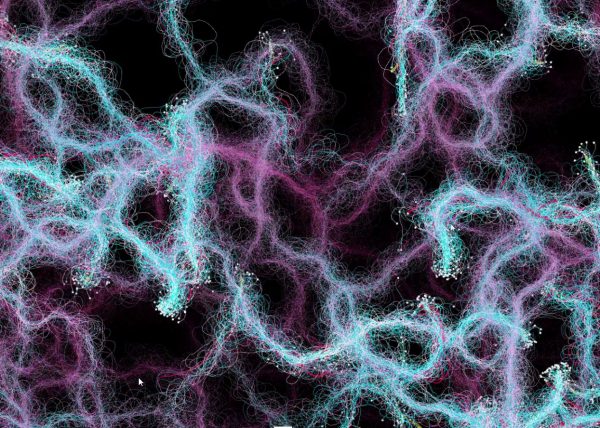
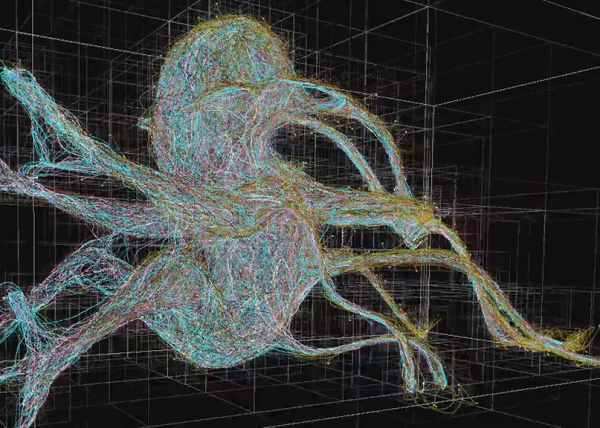
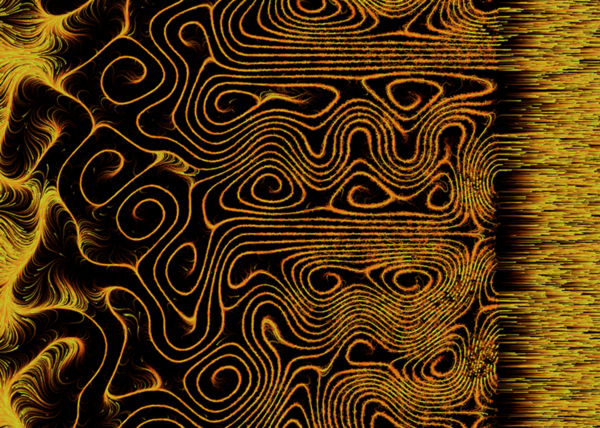
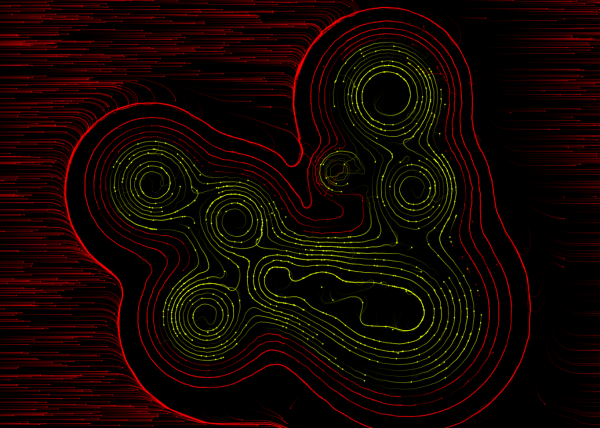
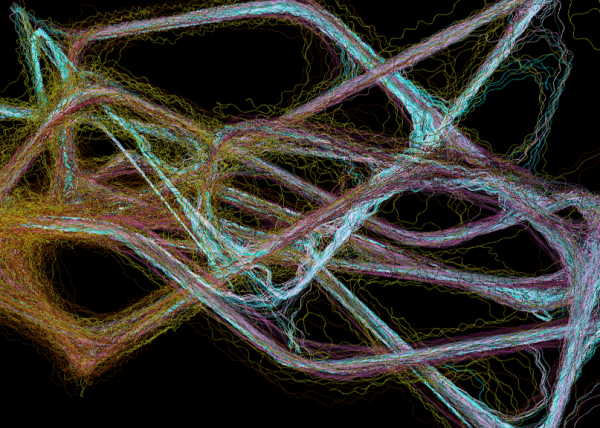
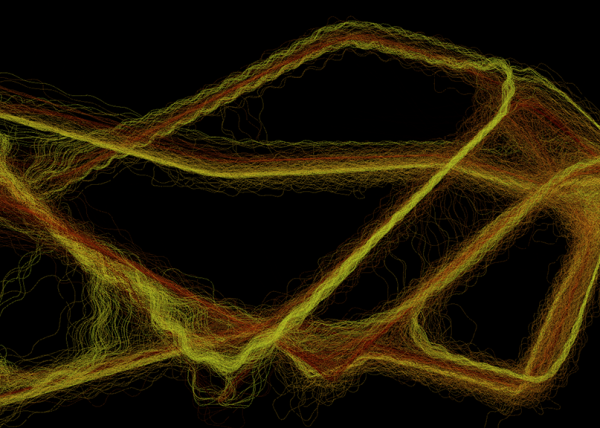
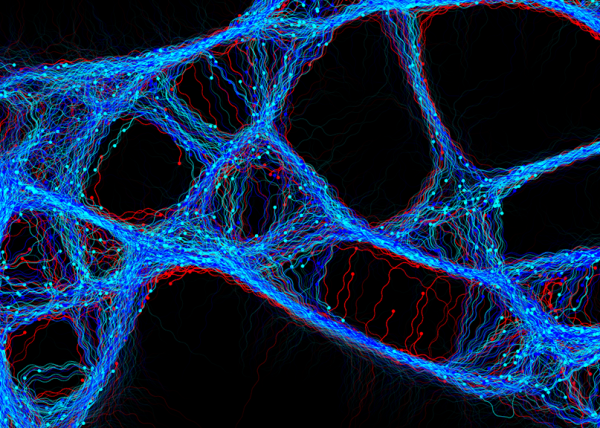
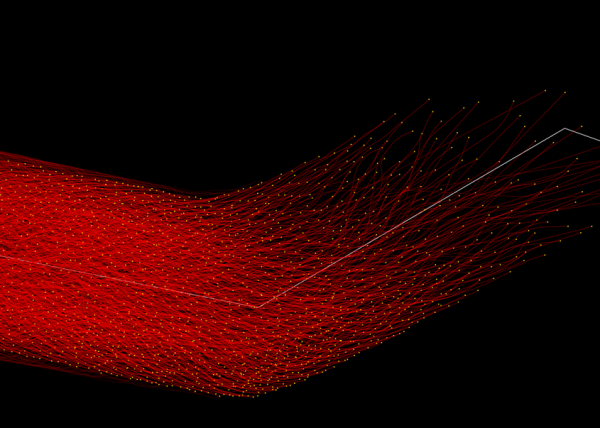
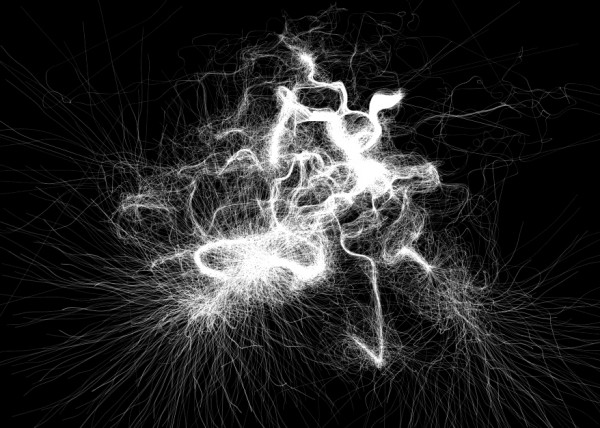
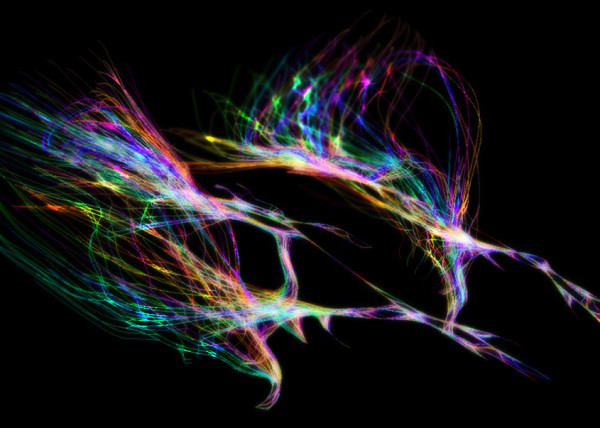
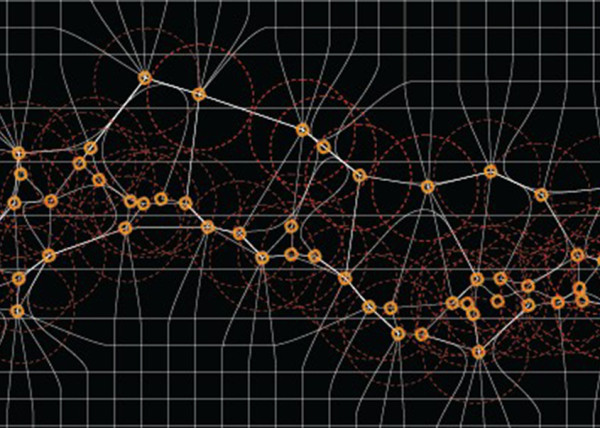
Behavior Network & Growth Optimization :
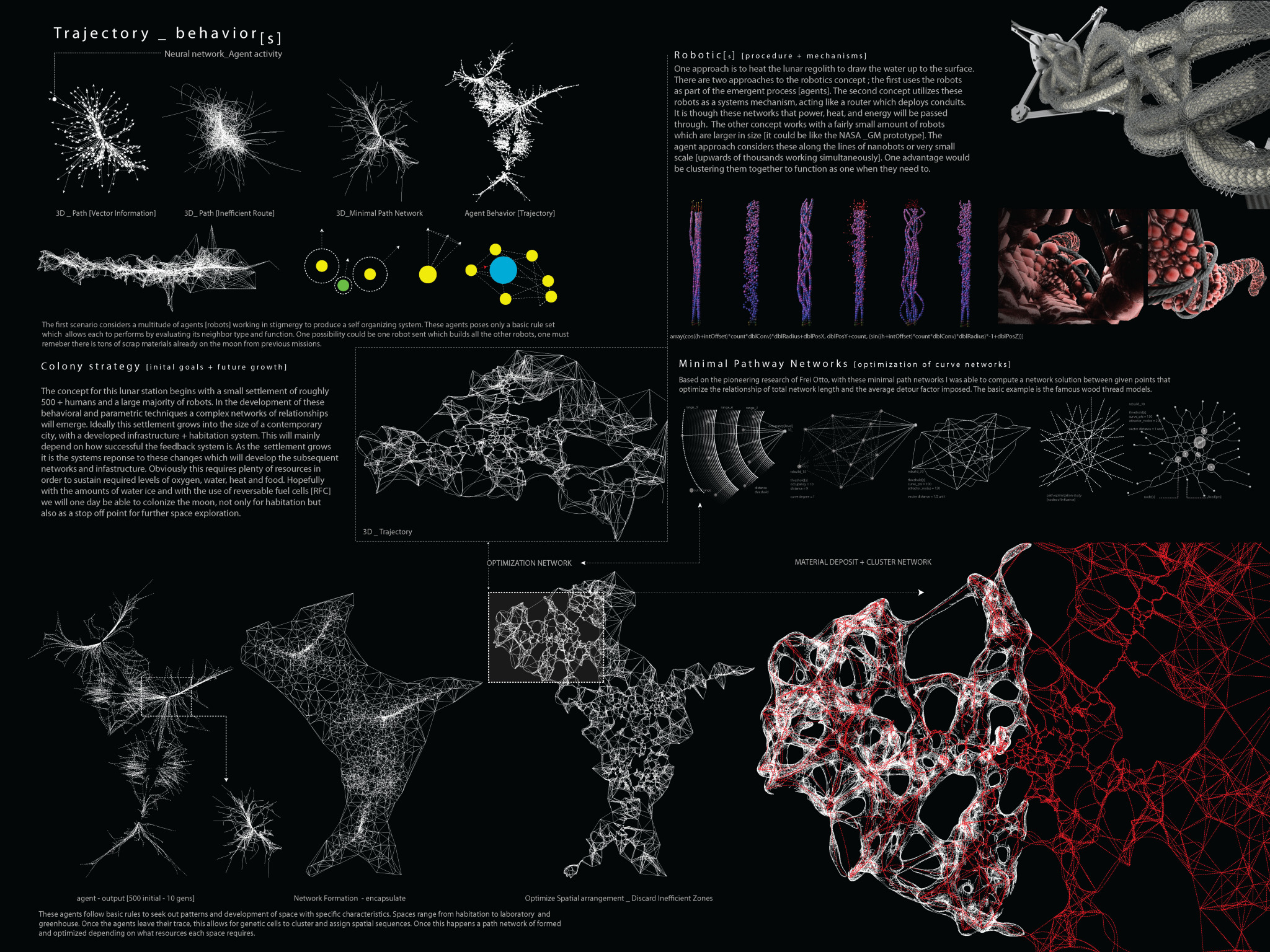
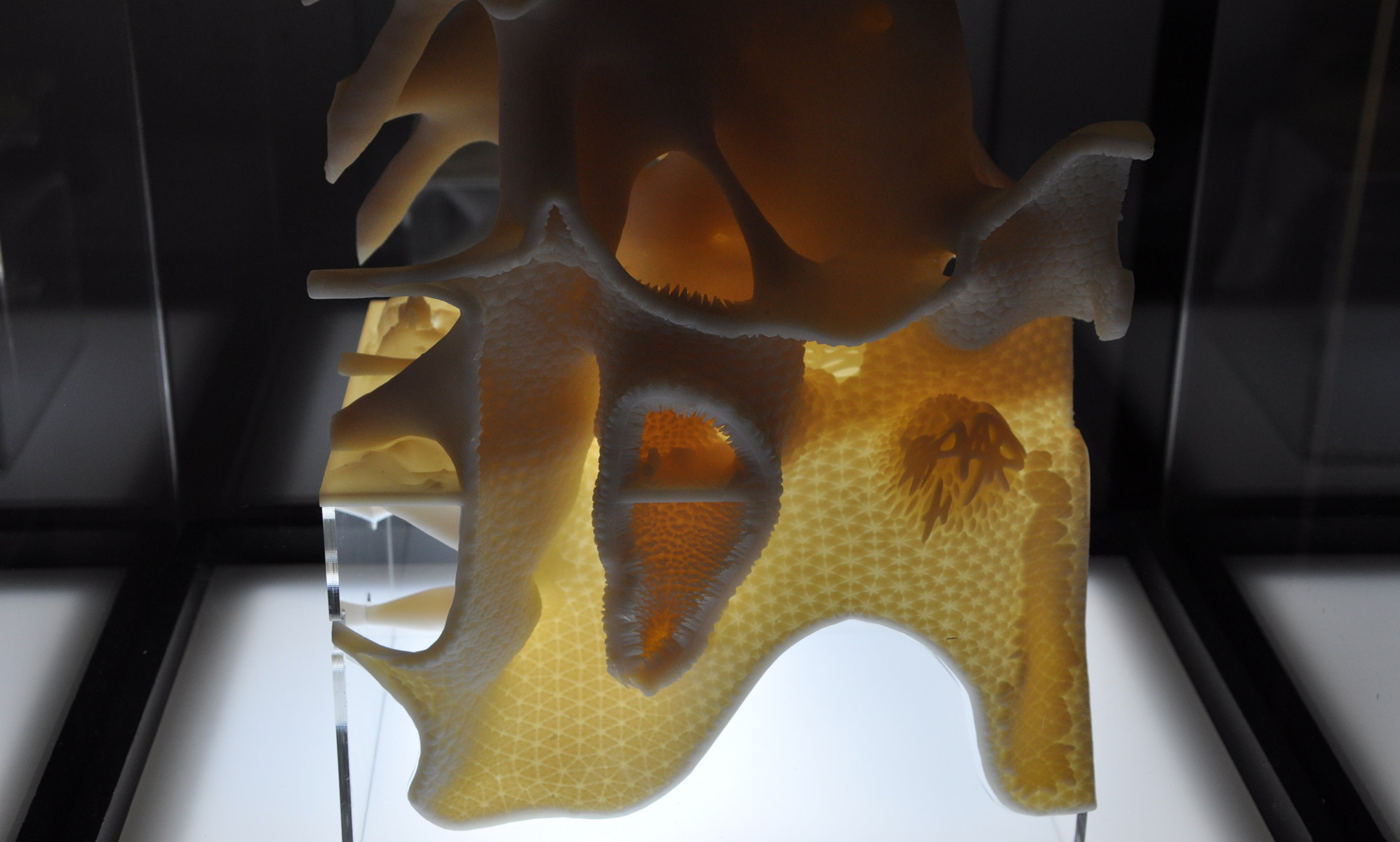
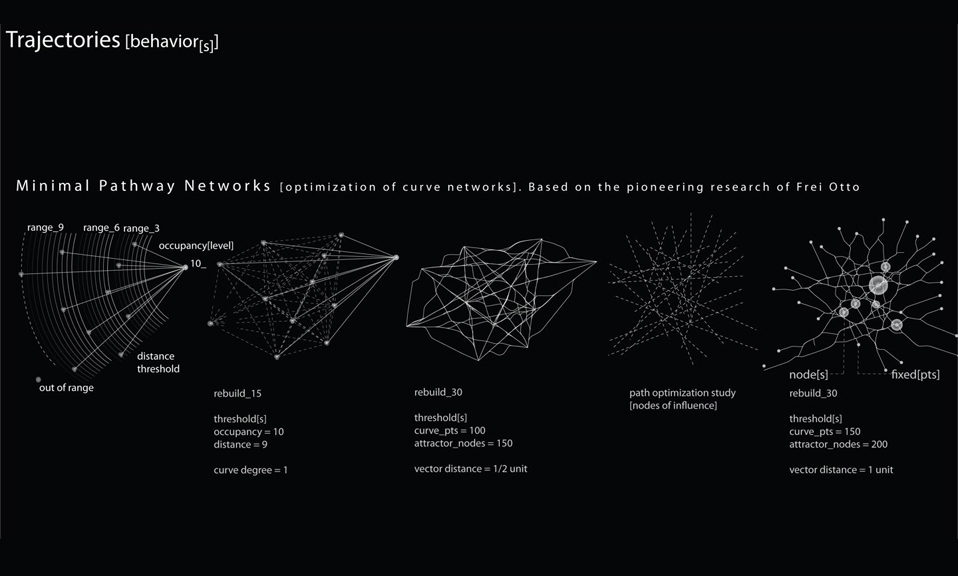
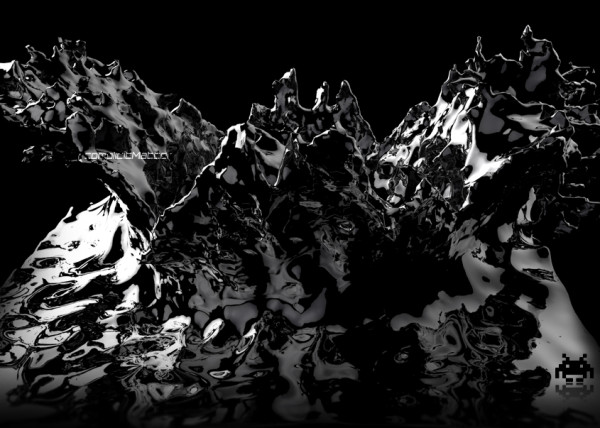
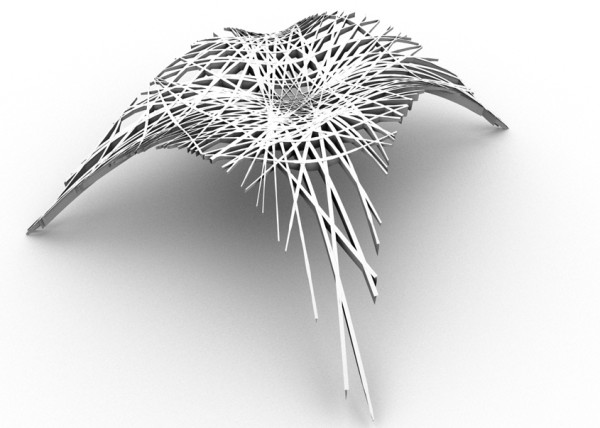
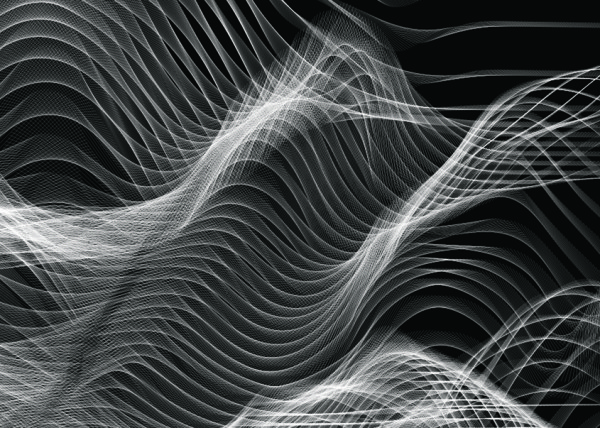
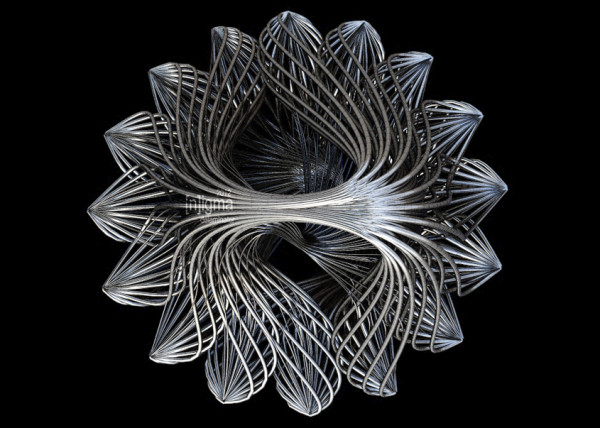
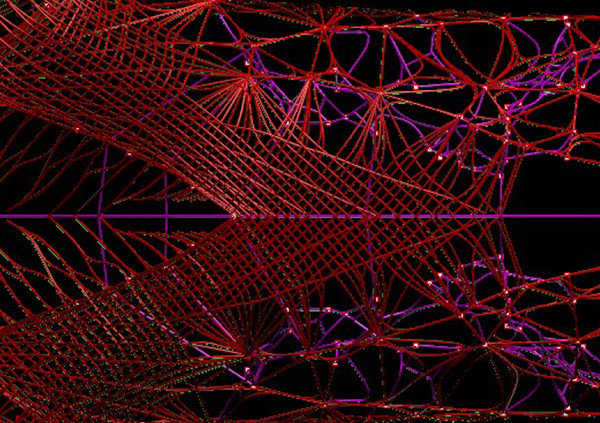
This set of diagrams explores how robotic agents use behavioral logic and environmental sensing to produce complex spatial networks over time. The movement of these agents is governed by principles of non-linear feedback, with simulations reflecting real-time adaptation to resource locations, solar orientation, and material thresholds. Influenced by the work of Frei Otto and neural mapping systems, agents establish minimal pathway networks—reducing inefficiency while maximizing redundancy and resilience. The resulting geometry is not pre-designed, but generated through iterative behavior: testing, adjusting, and responding to shifting inputs and environmental cues. As colonies grow—from an initial settlement of 500 humans to a larger infrastructural city—the habitat’s spatial logic evolves accordingly. These diagrams demonstrate how agent behavior results in architectural typologies that are both functionally optimized and visually expressive, rooted in environmental responsiveness and system intelligence. This work ultimately proposes a new form of authorship—where architecture is not drawn, but grown.
Recently in Portfolio
- [K]ernels

- Nike A.I.R Prototypes

- [A]nisochromatic Meshing
- Nike After Dark Tour

- PARAPRAXIS
- [001.HRR] CONCEPT BIKE

- 2040:LUNAR.OUTPOST[a]
- HE.6 2020 Prototype

- CULEBRA.NET

- PYTORCH-CLASSIFIER
- Nike Zoom Superfly Elite

- BENGBU CITY OPERA

- Nike Footscape Flyknit DM

- Jordan Hyperdunk React

- KA-HELMET

- [C]ucarachas
- [S]eeker
- [O]h Baby
- [E]l Papa
- [S]hatter.Brain

- [S]tigmergy
- [F]orces
- CULEBRA.JAVA

- [C]ulebra.MultiBehaviors
- [S]ticky Stuff
- [S]entinels
- [G]allopingTopiary
- RELUXOED

- [SRC] . Semi Rigid Car
- [P]erlin
- [E]ternal Wanderers
- [W]heelie
- [S]labacube
- [M]esh Crawlers

- [L]a Silla
- [3]D BabyMaking Trackstars
- [3]D Trackers
- [2]D BabyMaking Trackers
- [T]rackers
- CULEBRA GRASSHOPPER

- culebra.[M]eshCrawlers.3D

- culebra.[H]ybrid.3D

- culebra.[F]lorgy

- culebra.[F]ockers.3D
- culebra.[F]ockers.2D
- culebra.[N]oisey.3D

- [E]l Nino
- culebra.[S]elfOrg

- [D]rippin

- culebra.[N]oisey.2D

- [C]reepyCrawlers

- [J]eepresesCreepers
- [T]2000
- PUFFER PLEATNESS

- EMERGEN[CY]

- [L]iquified
- [S]uckedComp

- [X]plosion
- MR. EW

- [H]airGoo
- [B]alled
- [n]injaStars
- [b]loomer
- [t]rip city
- TAPE GUNNED
- [B]oom

- [M]iller Time
- [D]elamjam
- [B]rain Zapper
- [B]ig Bird
- [E]gg Tube Pavillion
- [A]llice’s Easter Tree
- [S]weet Honey
- [U]M.Urgent

- [t]oo.urgent
- [B]onnie..+..Clyde
- [B]io Mess
- [EL]Mojado.Virus
- [W]HAT the …!
- [H]ot Lava
- [P]leat Diddy
- [t]erminator easter egg
- Mr. BB
- [B]less You
- [F]antastic + Interactive
- [S]oo_Minimally_Pathed
- [P]uffer Fish.Fab
- [M]an Eater
- [AHH] Alien House Hunters

- [W]eave Machine
- Sportbike Racing

- Grappling

- Kart Racing

Leave a reply