Gallery details
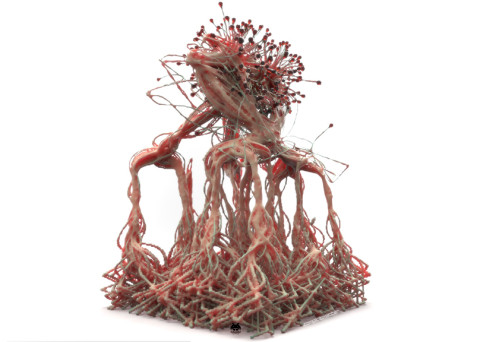
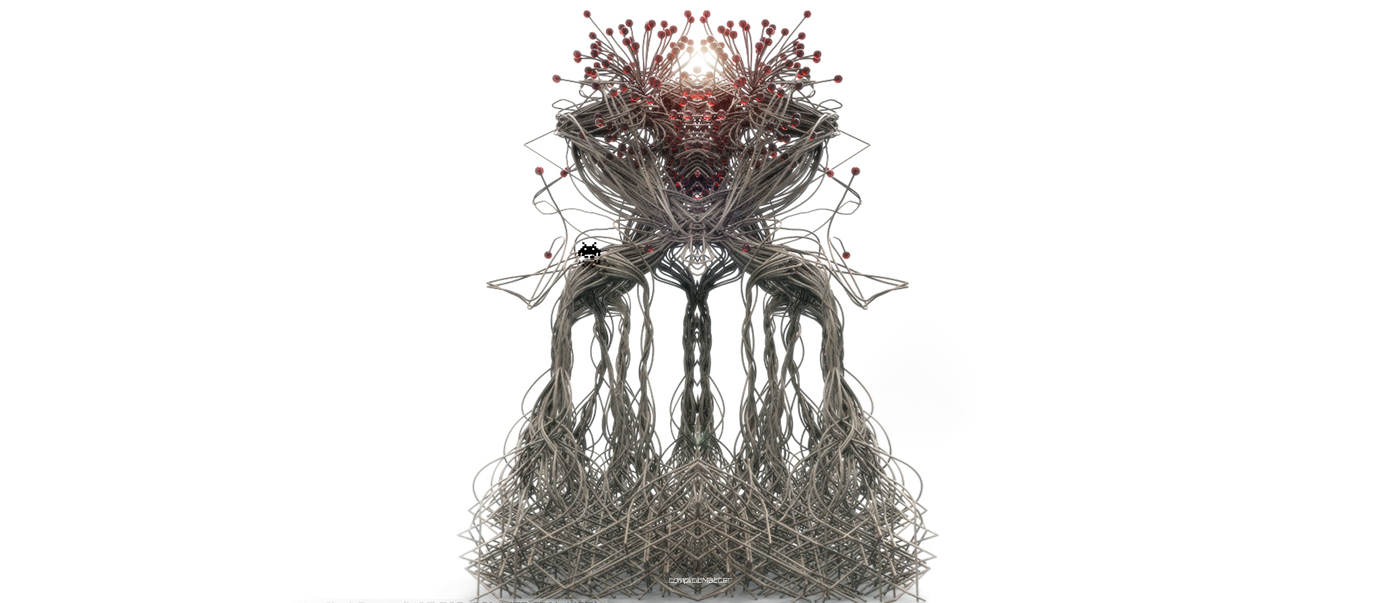
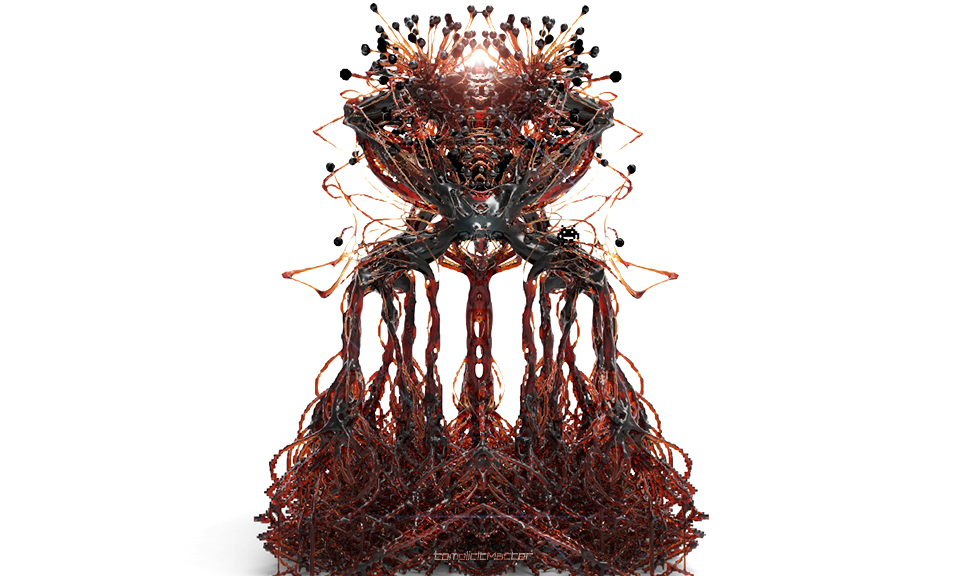
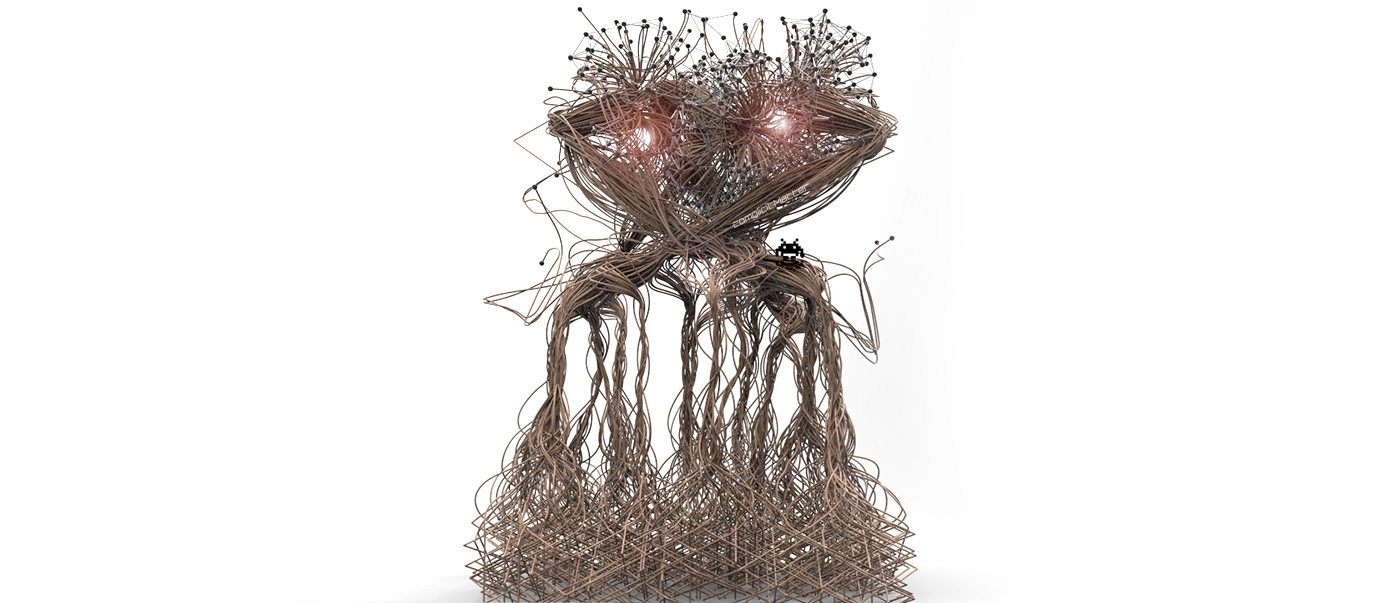
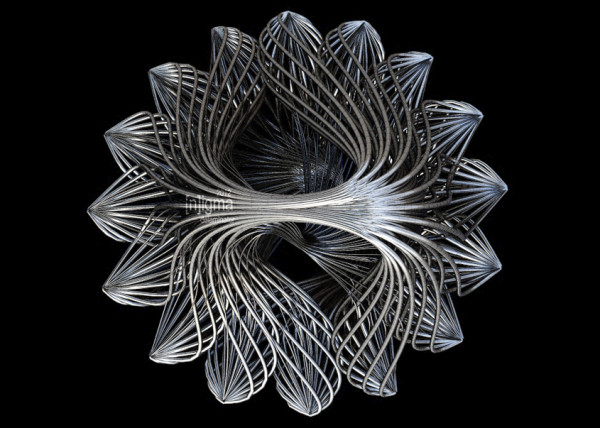
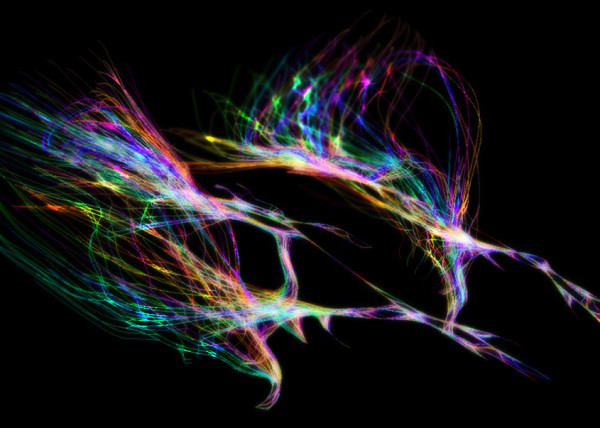
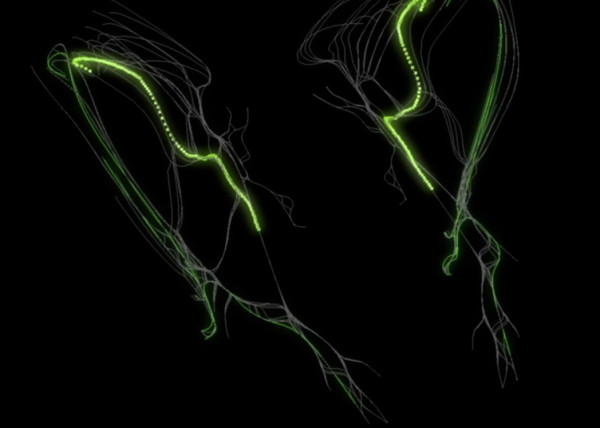
Code Creates Creepy Crawlers implementing the basic swarm algorithm logic with some fun stuff. – C#
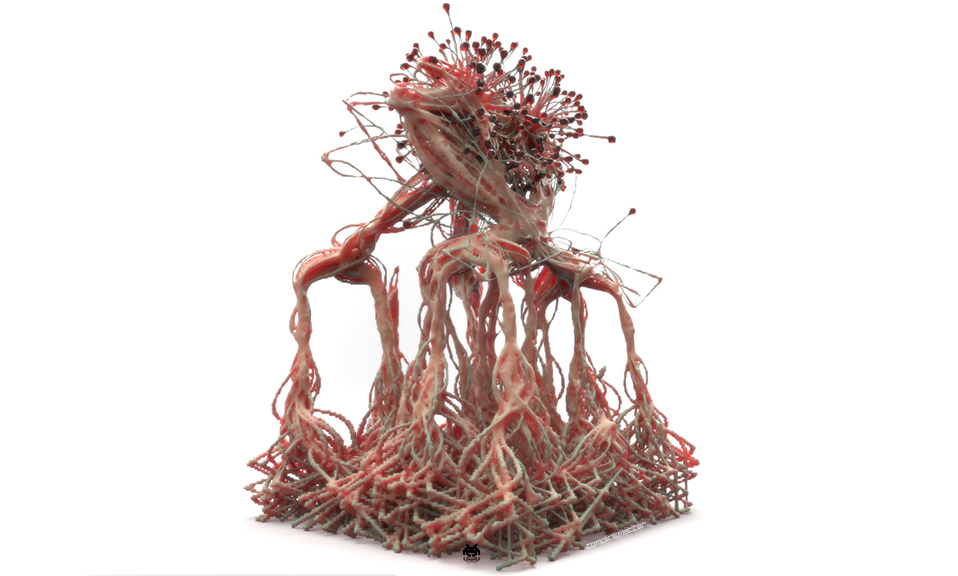
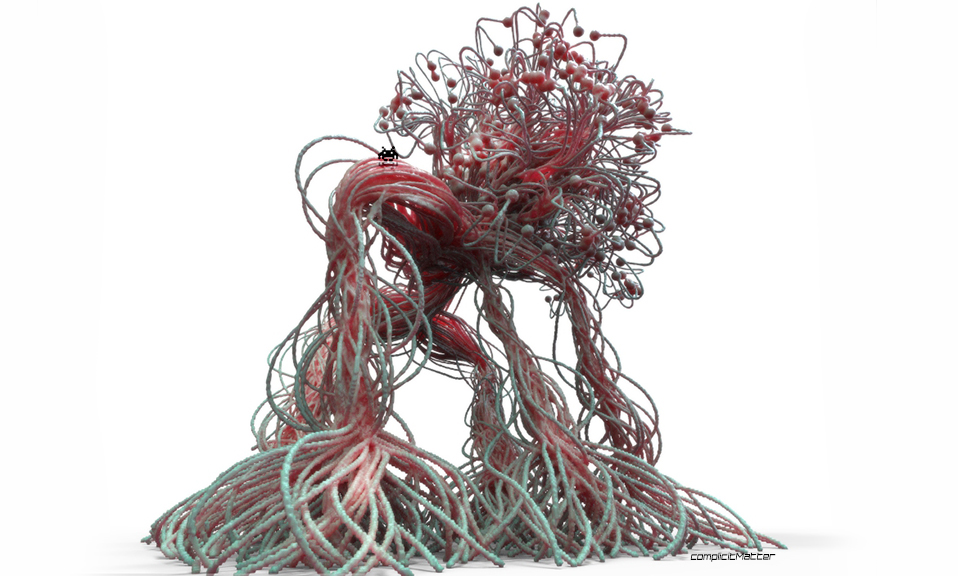
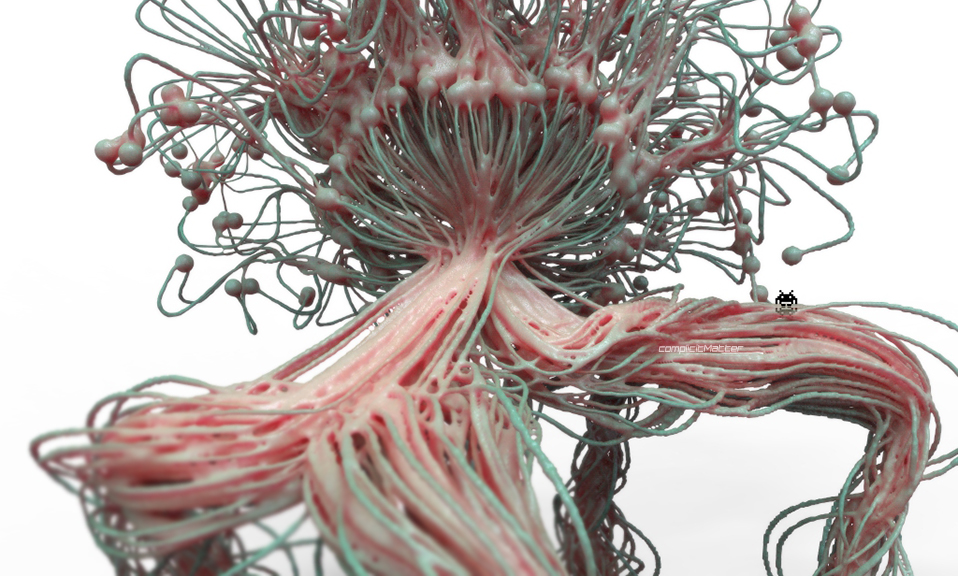
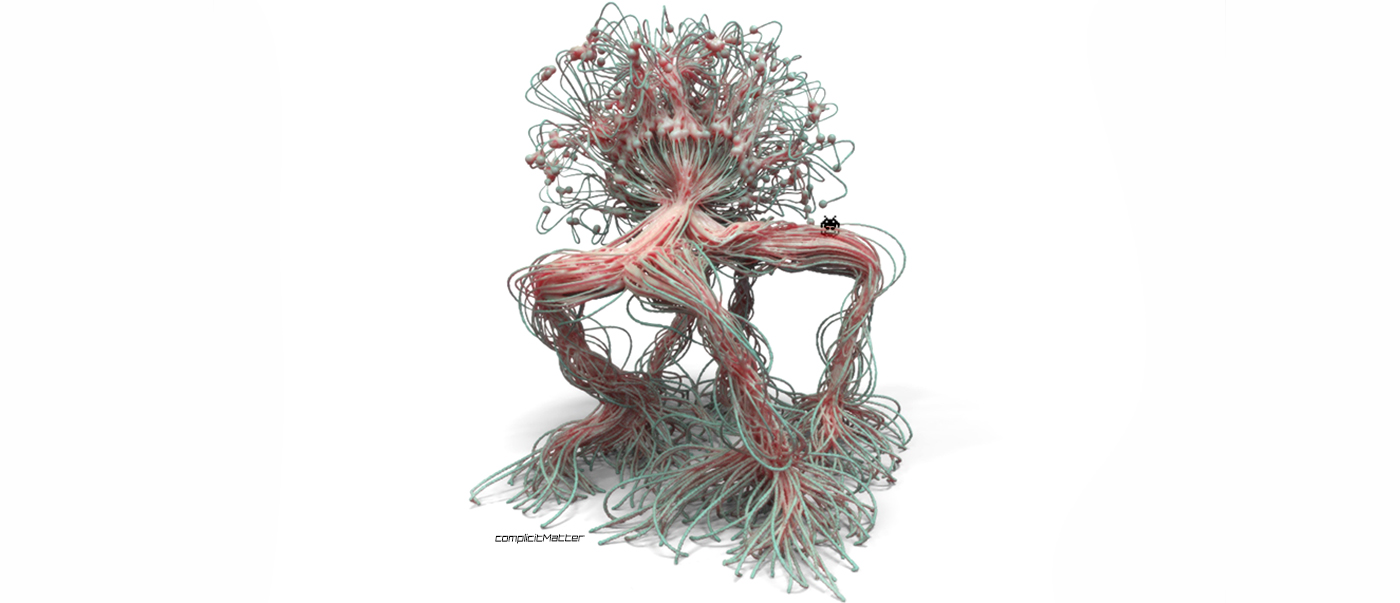
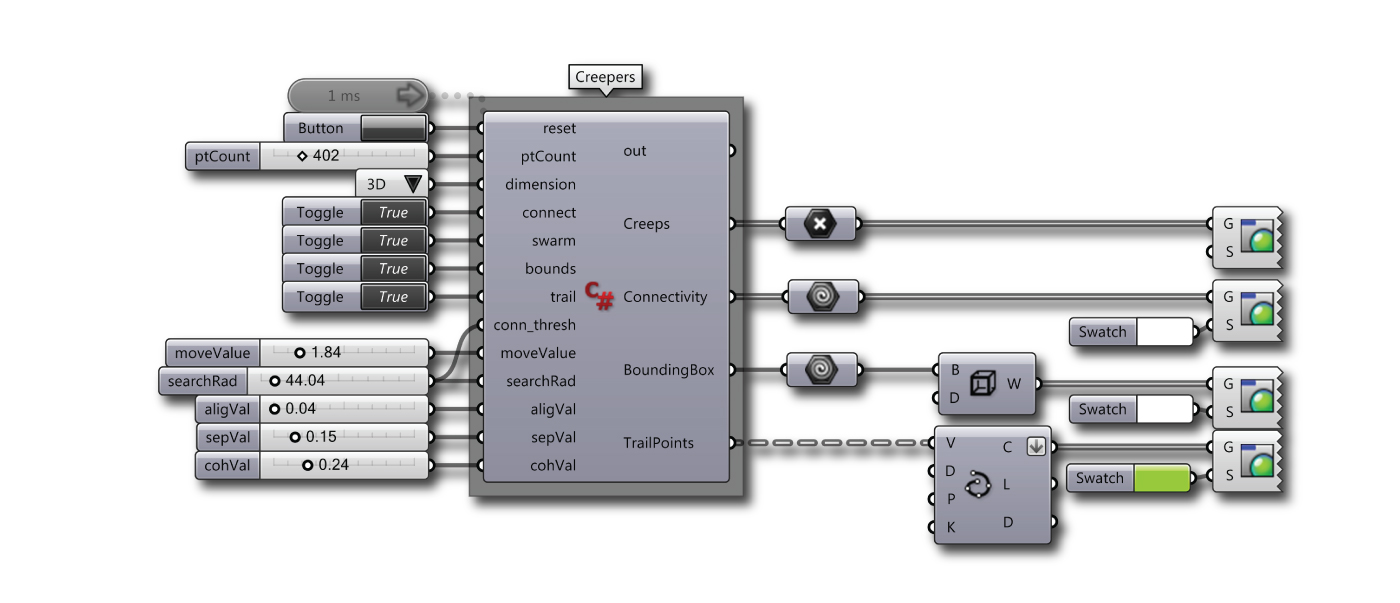
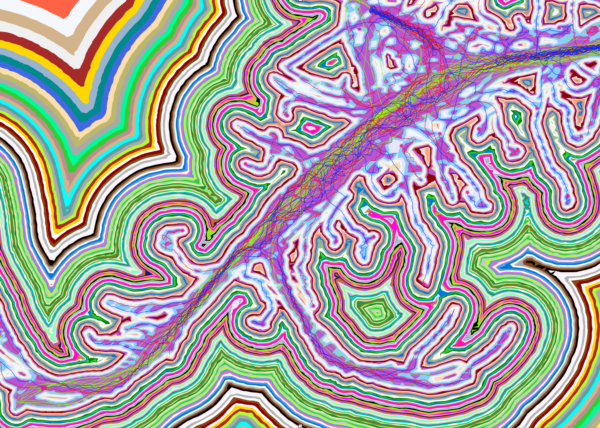
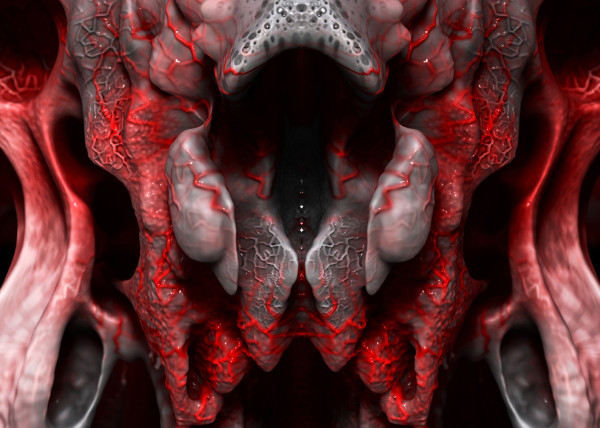
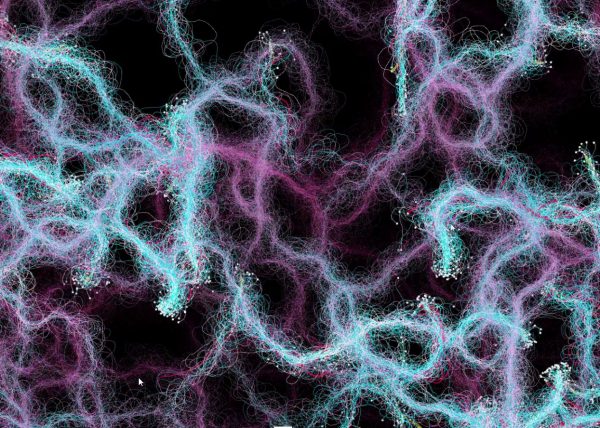
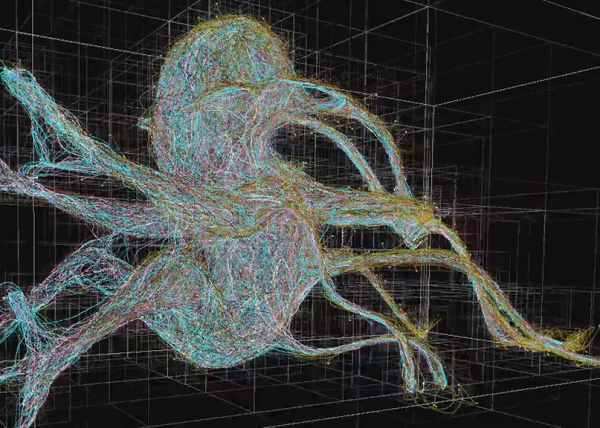
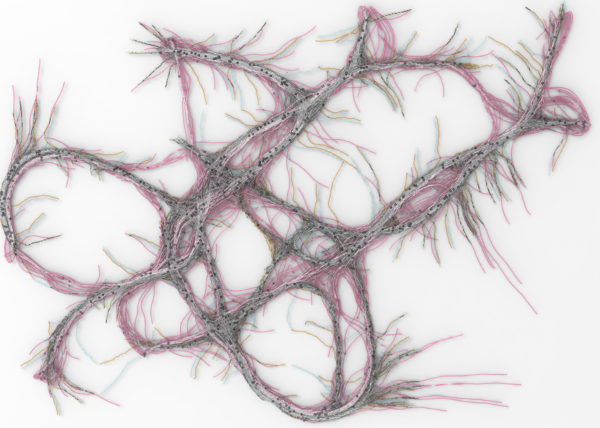
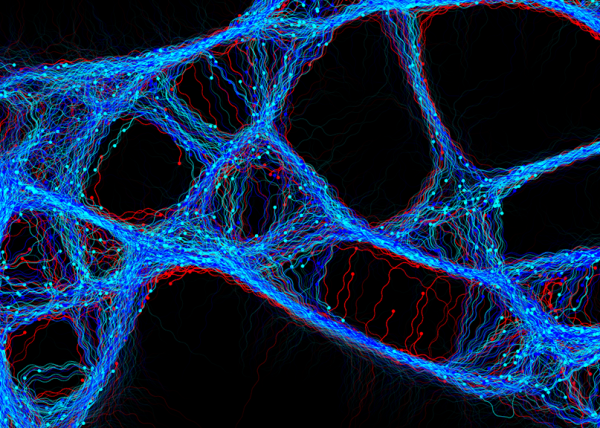
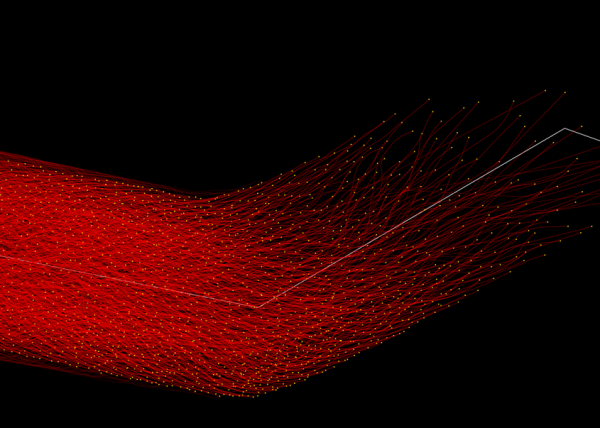
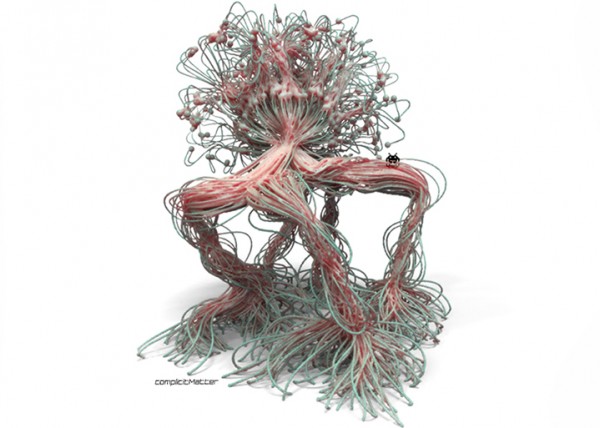
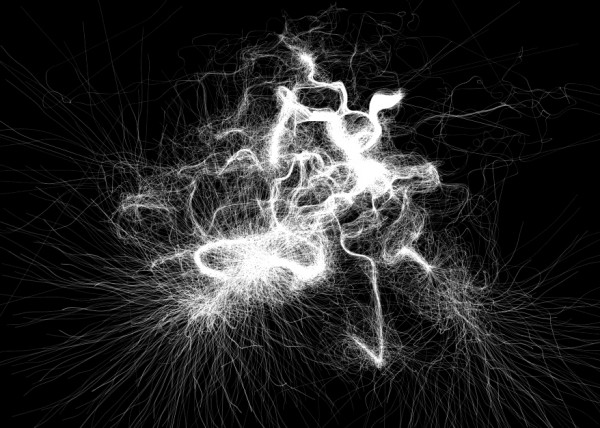
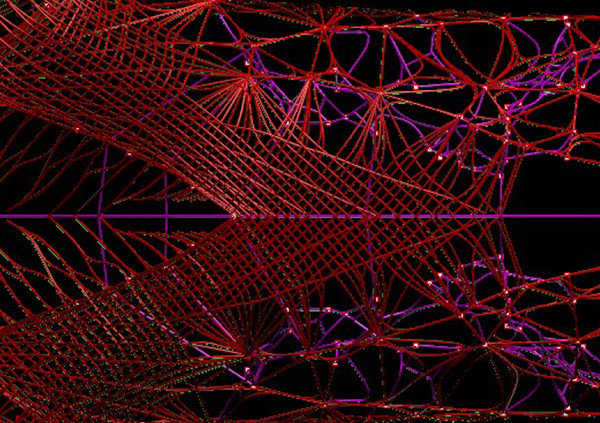
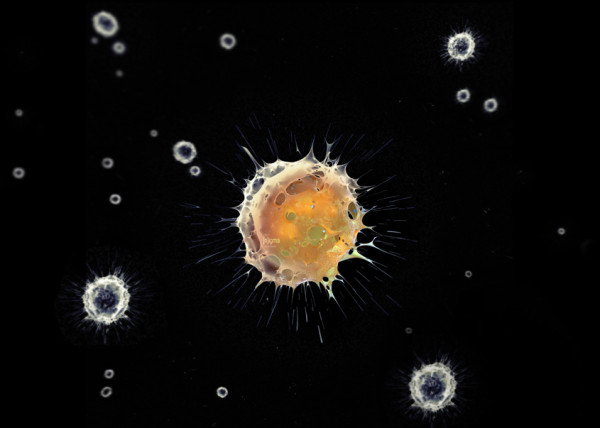
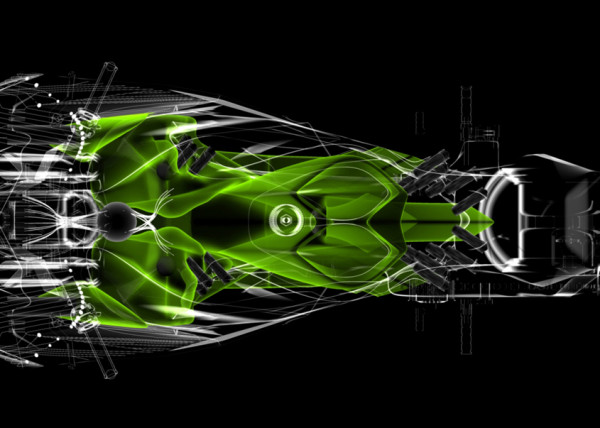
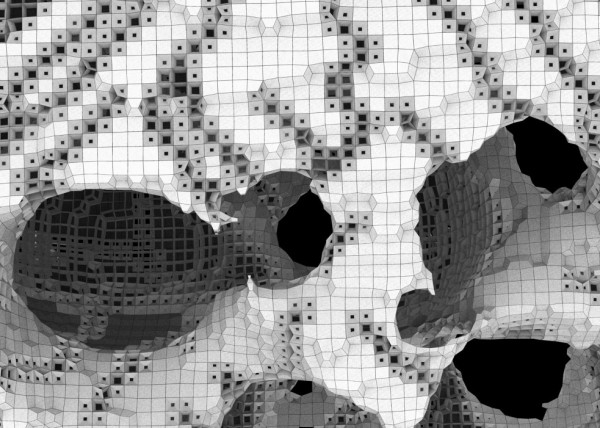
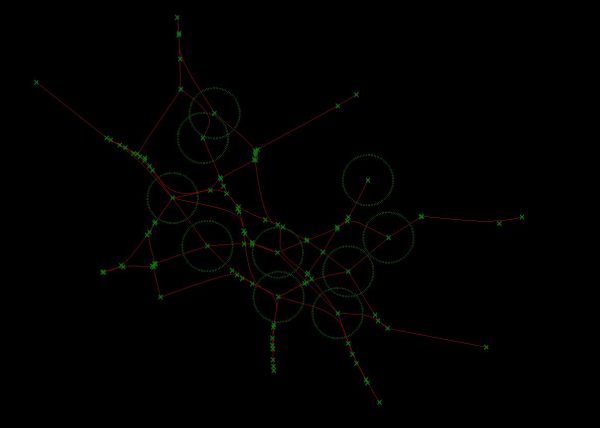
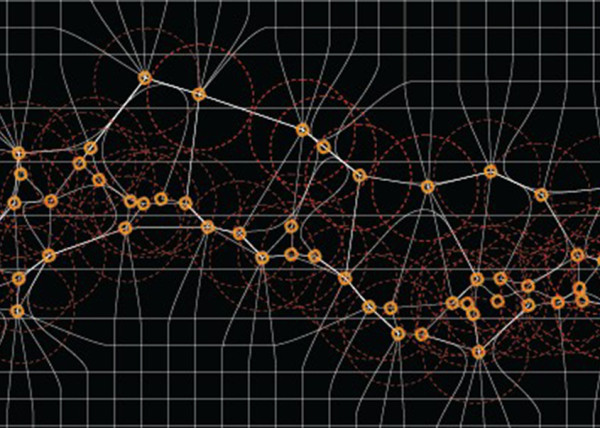
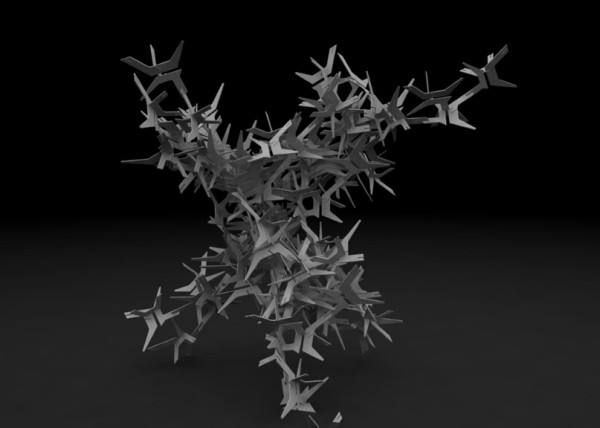
—Quick Study building off of JeepresesCreepers example. Here we have creepy crawlers moving in 2d & 3d. We have implemented the basic swarm algorithm logic to the creepers causing them to turn into creepy crawlers. Each creepy crawler can only see as far as the threshold we provide, which we can visualize by using the connect (link) toggle. We can either contain the creepy crawlers or let them run free as well as run them in 2d or in 3d. Inside the code you can enable or disable spawn types (all on the ground plane, or randomly in the bounding area or along an axis etc). Once again we are using the timer, we are also using data trees to store to previous positions so we can create the trail. This is causing some pretty heavy performance hits once the component has been running for some time. At first it runs very fast however after a few minutes it begins to slow down, I have added a boolean toggle for the trails so you can start the sim and set the trails to false, this will provide a huge performance increase in speed, you can at any time enable it back to true and see the trails and vice versa (if you want the trails to start where the crawlers started then begin the sim with the trails enabled then immediately turn them off as the sim is running, wait however long youd like and turn them back on and it will have kept those previous positions stored and the trail will be created.—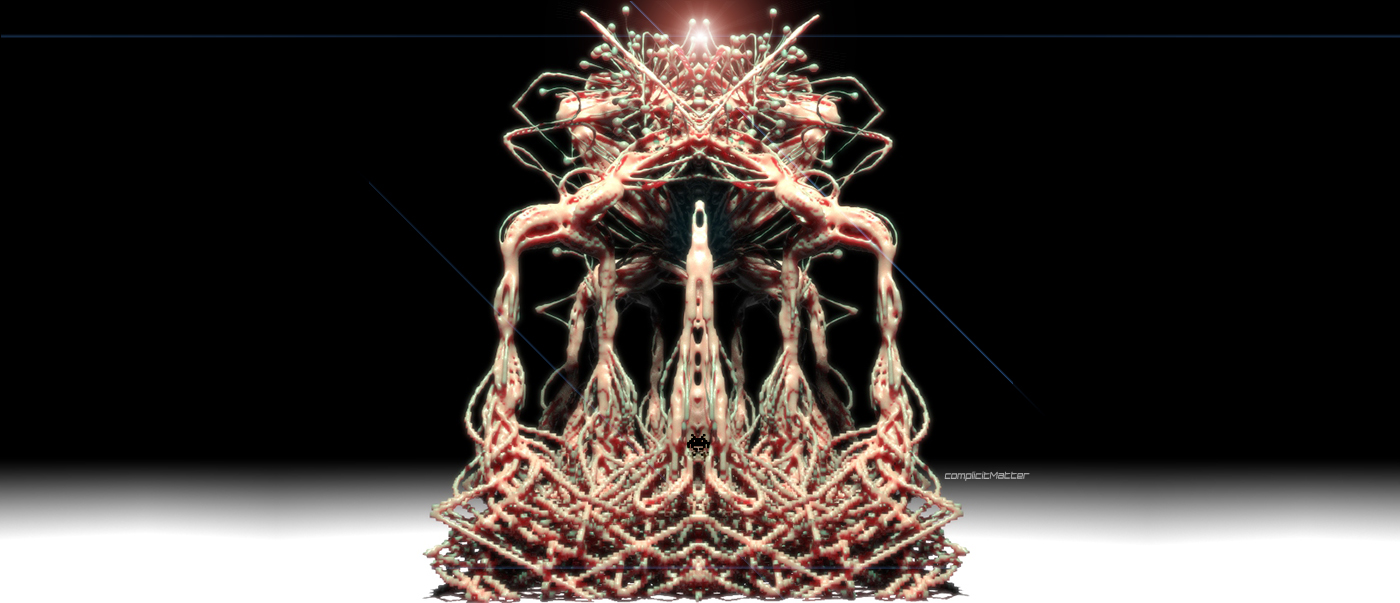







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Using Grasshopper C# components for the code snippets below – All Test code is provided on an ‘as-is’ basis for evaluation, testing and commenting purposes. I am not responsible for any damage incurred by its usage. Use at your own risk.
CreepyCrawler Class - C# Code
[snippet slug=creepycrawlers_b lang=csharp]
Recently in Portfolio
- [K]ernels

- Nike A.I.R Prototypes

- [A]nisochromatic Meshing
- Nike After Dark Tour

- PARAPRAXIS
- [001.HRR] CONCEPT BIKE

- 2040:LUNAR.OUTPOST[a]
- HE.6 2020 Prototype

- CULEBRA.NET

- PYTORCH-CLASSIFIER
- Nike Zoom Superfly Elite

- BENGBU CITY OPERA

- Nike Footscape Flyknit DM

- Jordan Hyperdunk React

- KA-HELMET

- [C]ucarachas
- [S]eeker
- [O]h Baby
- [E]l Papa
- [S]hatter.Brain

- [S]tigmergy
- [F]orces
- CULEBRA.JAVA

- [C]ulebra.MultiBehaviors
- [S]ticky Stuff
- [S]entinels
- [G]allopingTopiary
- RELUXOED

- [SRC] . Semi Rigid Car
- [P]erlin
- [E]ternal Wanderers
- [W]heelie
- [S]labacube
- [M]esh Crawlers

- [L]a Silla
- [3]D BabyMaking Trackstars
- [3]D Trackers
- [2]D BabyMaking Trackers
- [T]rackers
- CULEBRA GRASSHOPPER

- culebra.[M]eshCrawlers.3D

- culebra.[H]ybrid.3D

- culebra.[F]lorgy

- culebra.[F]ockers.3D
- culebra.[F]ockers.2D
- culebra.[N]oisey.3D

- [E]l Nino
- culebra.[S]elfOrg

- [D]rippin

- culebra.[N]oisey.2D

- [C]reepyCrawlers

- [J]eepresesCreepers
- [T]2000
- PUFFER PLEATNESS

- EMERGEN[CY]

- [L]iquified
- [S]uckedComp

- [X]plosion
- MR. EW

- [H]airGoo
- [B]alled
- [n]injaStars
- [b]loomer
- [t]rip city
- TAPE GUNNED
- [B]oom

- [M]iller Time
- [D]elamjam
- [B]rain Zapper
- [B]ig Bird
- [E]gg Tube Pavillion
- [A]llice’s Easter Tree
- [S]weet Honey
- [U]M.Urgent

- [t]oo.urgent
- [B]onnie..+..Clyde
- [B]io Mess
- [EL]Mojado.Virus
- [W]HAT the …!
- [H]ot Lava
- [P]leat Diddy
- [t]erminator easter egg
- Mr. BB
- [B]less You
- [F]antastic + Interactive
- [S]oo_Minimally_Pathed
- [P]uffer Fish.Fab
- [M]an Eater
- [AHH] Alien House Hunters

- [W]eave Machine
- Sportbike Racing

- Grappling

- Kart Racing

Leave a reply