Gallery details
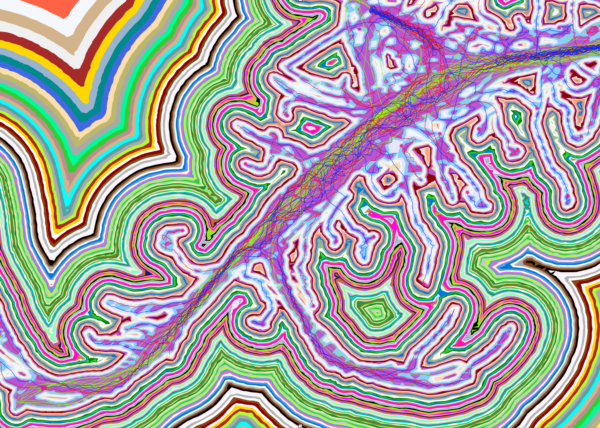
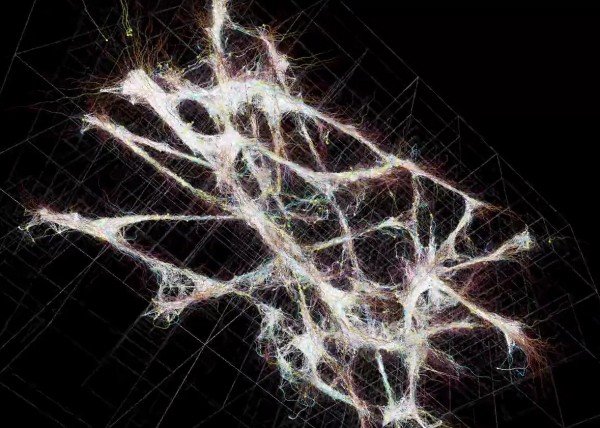
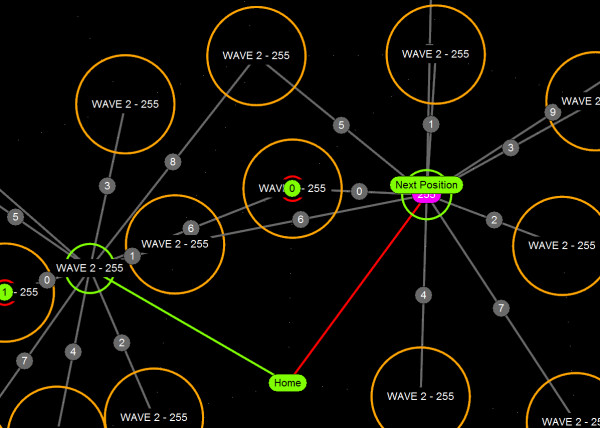
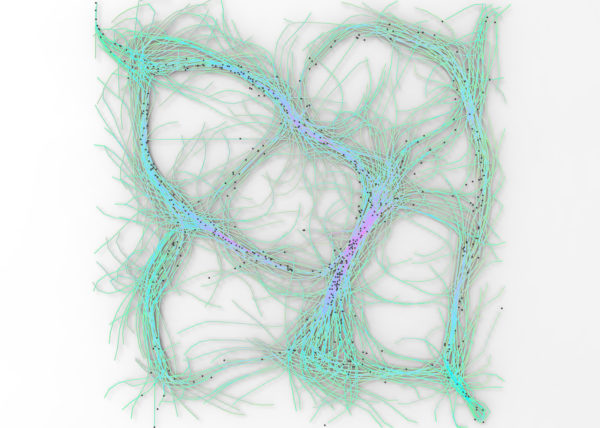
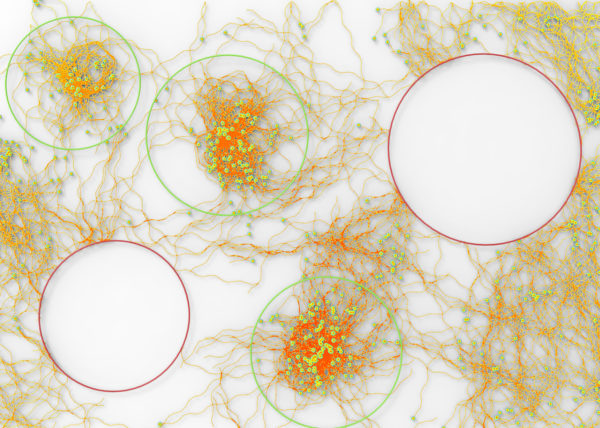
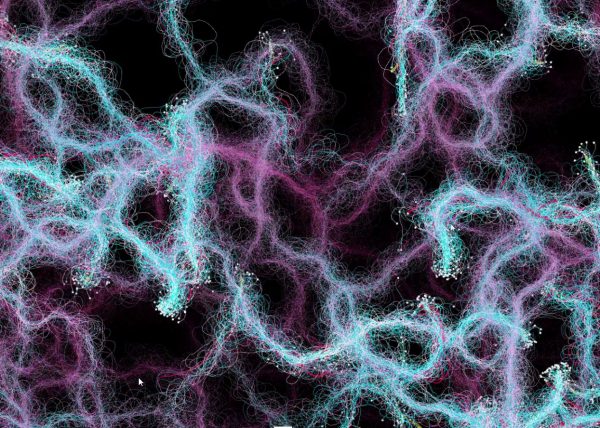
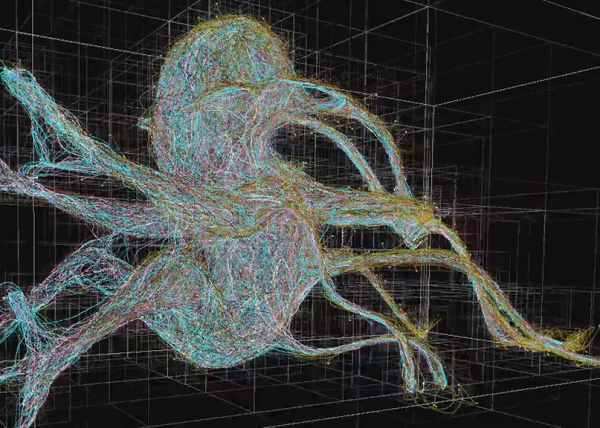
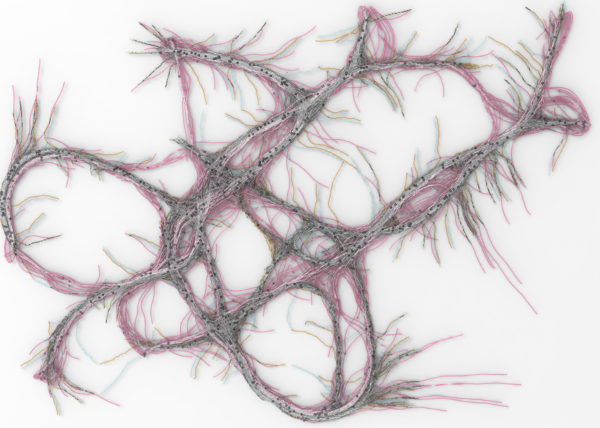
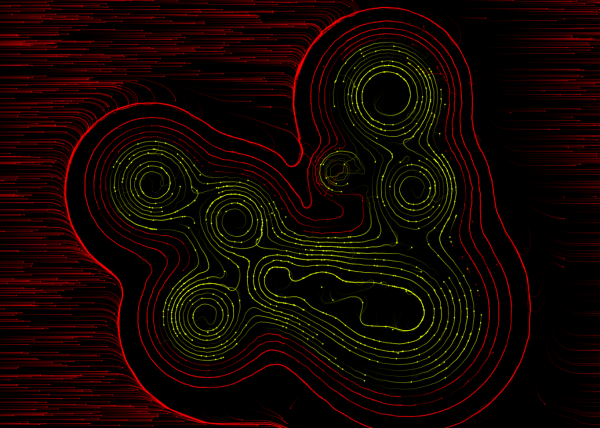
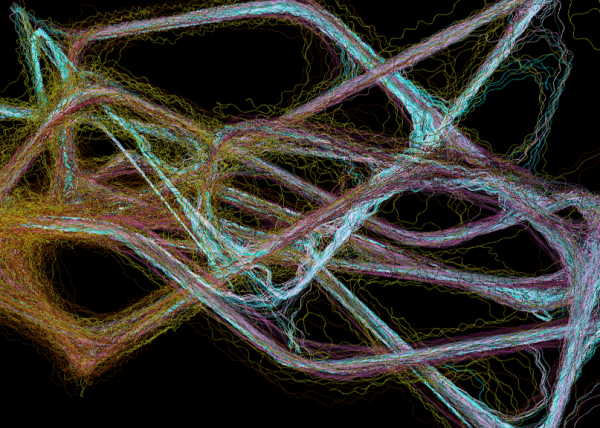
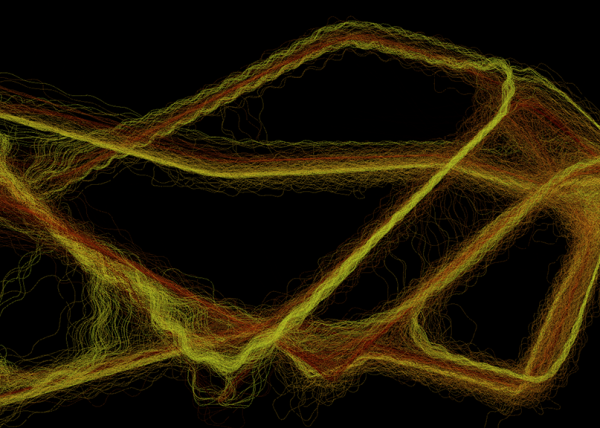
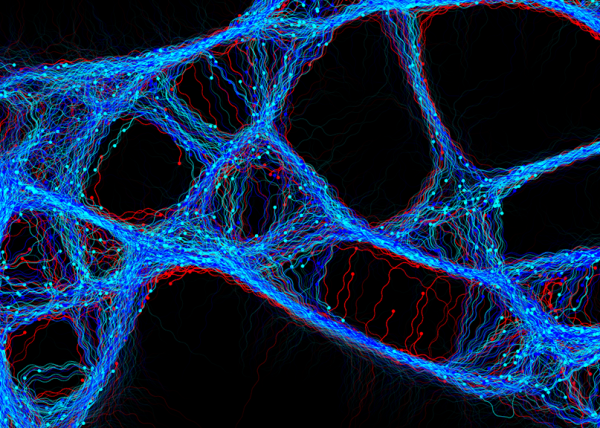
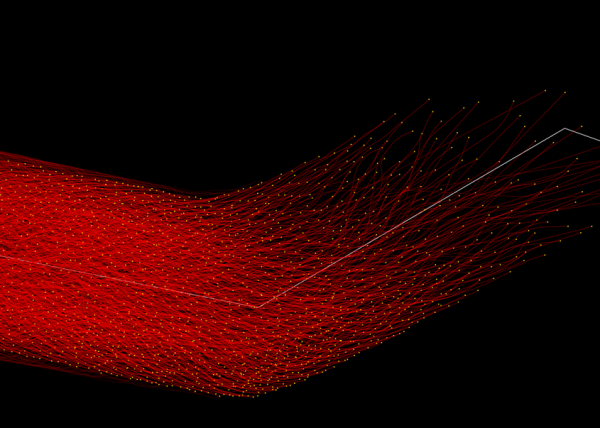
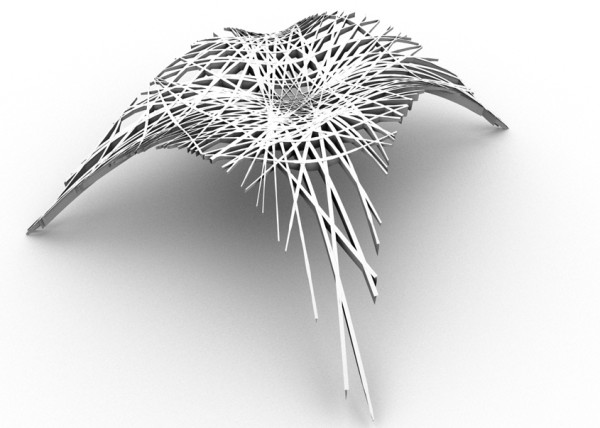
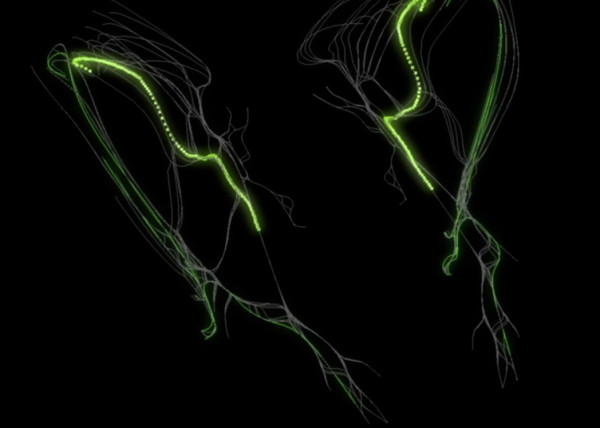
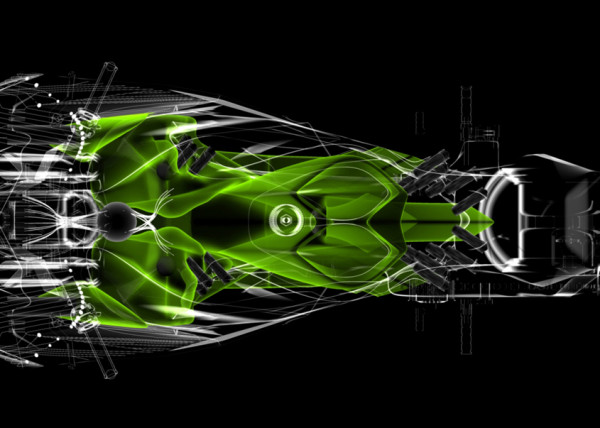
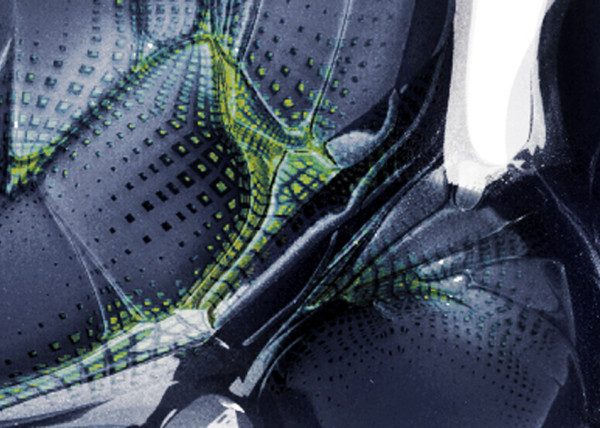
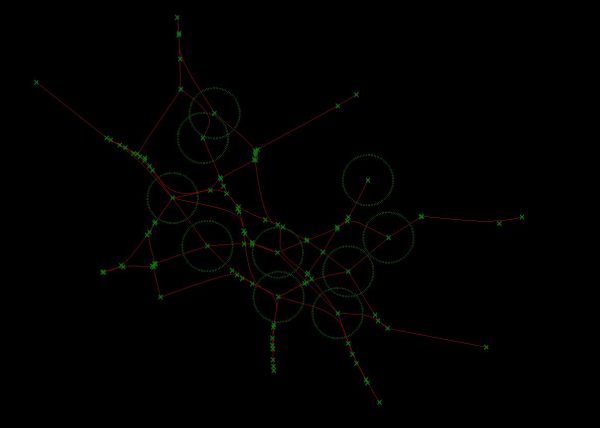
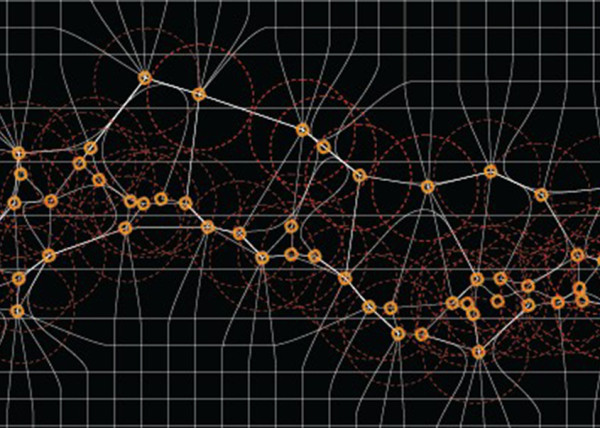
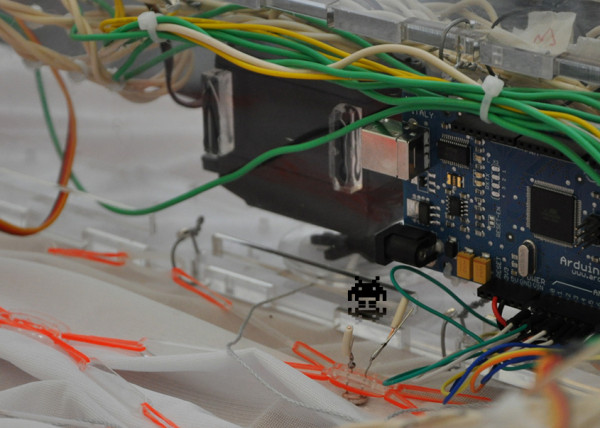
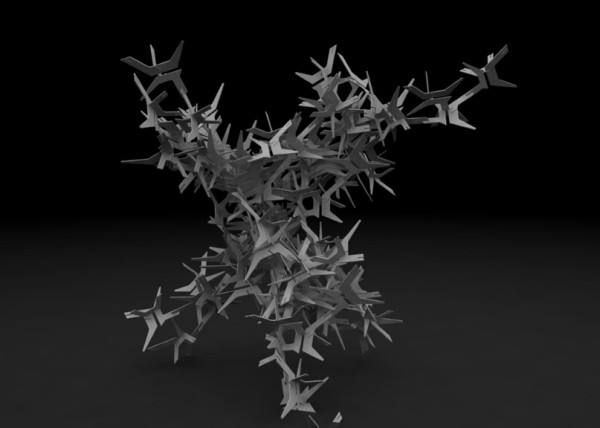
Culebra MultiBehavior Connectivity System – OcTree Optimized
Download the App – prolebra.0.9Beta snippet Test
A multi behavior octree optimized multi agent system built in Processing 3.0 inspired by flocking and Silkworm Behaviors.
PROCESSING 3.0 SKETCH CODE
Recently in Portfolio
- [K]ernels

- Nike A.I.R Prototypes

- [A]nisochromatic Meshing
- Nike After Dark Tour

- PARAPRAXIS
- [001.HRR] CONCEPT BIKE

- 2040:LUNAR.OUTPOST[a]
- HE.6 2020 Prototype

- CULEBRA.NET

- PYTORCH-CLASSIFIER
- Nike Zoom Superfly Elite

- BENGBU CITY OPERA

- Nike Footscape Flyknit DM

- Jordan Hyperdunk React

- KA-HELMET

- [C]ucarachas
- [S]eeker
- [O]h Baby
- [E]l Papa
- [S]hatter.Brain

- [S]tigmergy
- [F]orces
- CULEBRA.JAVA

- [C]ulebra.MultiBehaviors
- [S]ticky Stuff
- [S]entinels
- [G]allopingTopiary
- RELUXOED

- [SRC] . Semi Rigid Car
- [P]erlin
- [E]ternal Wanderers
- [W]heelie
- [S]labacube
- [M]esh Crawlers

- [L]a Silla
- [3]D BabyMaking Trackstars
- [3]D Trackers
- [2]D BabyMaking Trackers
- [T]rackers
- CULEBRA GRASSHOPPER

- culebra.[M]eshCrawlers.3D

- culebra.[H]ybrid.3D

- culebra.[F]lorgy

- culebra.[F]ockers.3D
- culebra.[F]ockers.2D
- culebra.[N]oisey.3D

- [E]l Nino
- culebra.[S]elfOrg

- [D]rippin

- culebra.[N]oisey.2D

- [C]reepyCrawlers

- [J]eepresesCreepers
- [T]2000
- PUFFER PLEATNESS

- EMERGEN[CY]

- [L]iquified
- [S]uckedComp

- [X]plosion
- MR. EW

- [H]airGoo
- [B]alled
- [n]injaStars
- [b]loomer
- [t]rip city
- TAPE GUNNED
- [B]oom

- [M]iller Time
- [D]elamjam
- [B]rain Zapper
- [B]ig Bird
- [E]gg Tube Pavillion
- [A]llice’s Easter Tree
- [S]weet Honey
- [U]M.Urgent

- [t]oo.urgent
- [B]onnie..+..Clyde
- [B]io Mess
- [EL]Mojado.Virus
- [W]HAT the …!
- [H]ot Lava
- [P]leat Diddy
- [t]erminator easter egg
- Mr. BB
- [B]less You
- [F]antastic + Interactive
- [S]oo_Minimally_Pathed
- [P]uffer Fish.Fab
- [M]an Eater
- [AHH] Alien House Hunters

- [W]eave Machine
- Sportbike Racing

- Grappling

- Kart Racing

What a beautiful design! I want to know how you can make the track sure bright. I can use Rhino to make the lines. But how can I capture the drawing from Rhino? or you use rendering software to do that?
This video is using processing, I built the original library for java and used it in processing, later I built the .NET version that works with Grasshopper. You can download Culebra 2 and use that with Rhino & GH. I am actually updating it for Rhino 7 as well.