Gallery details

created at Mode Lab Experiments
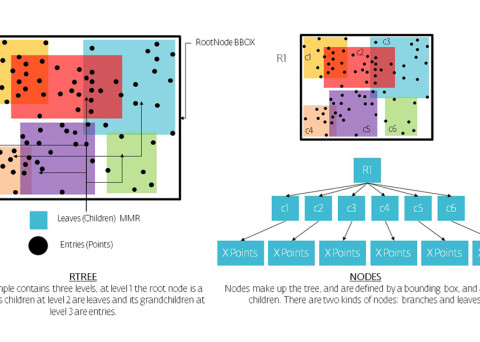
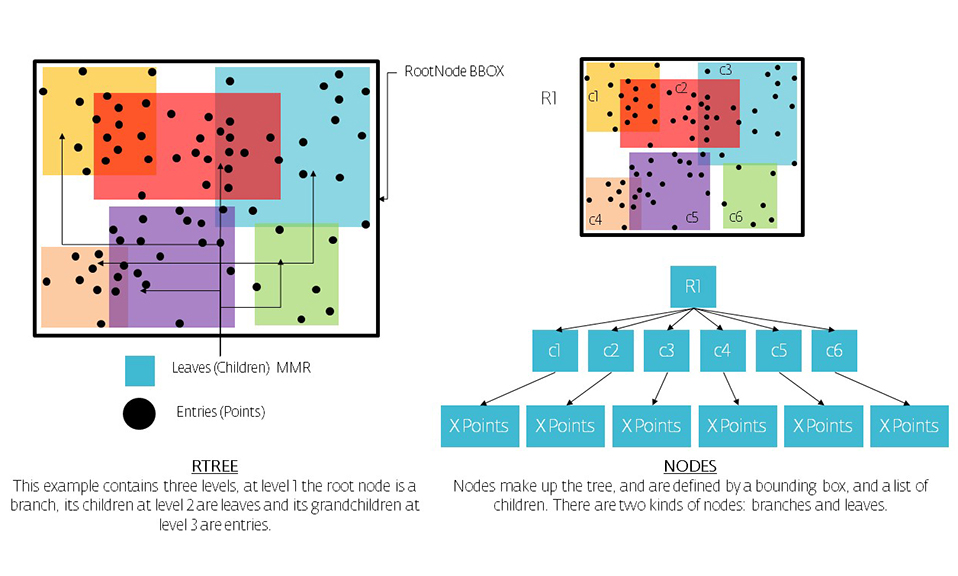
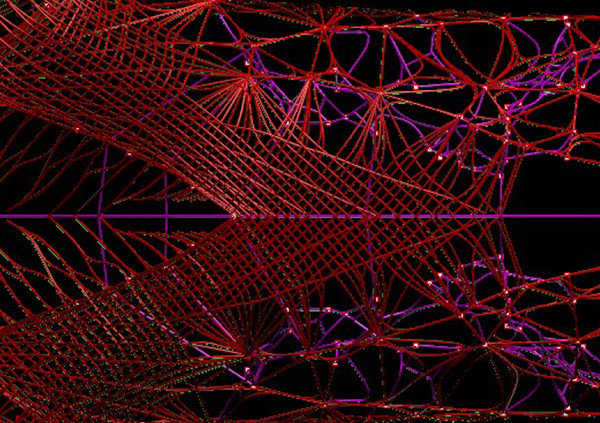
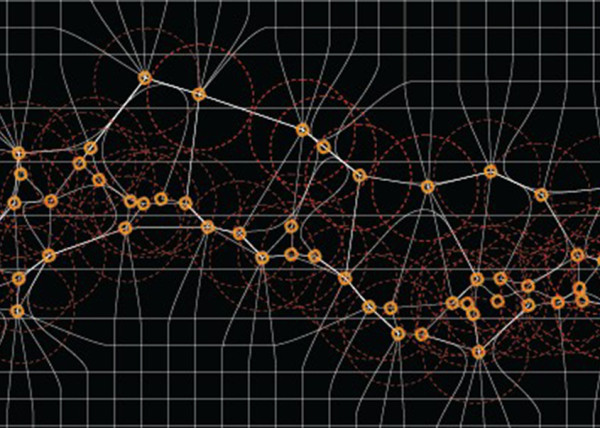
R-trees are balanced tree data structures used for spatial access methods in N-dimensional space. Implementing the RTree Class will allows us to reduce the search space by incorporating a searching sphere or bbox . R-tree is also a balanced search tree (so all leaf nodes are at the same height), organizes the data in pages, and is designed for storage on disk.
The key idea of the data structure is to group nearby objects and represent them with their minimum bounding rectangle (MBR) in the next higher level of the tree. Since all objects lie within this bounding rectangle, a query that does not intersect the bounding rectangle also cannot intersect any of the contained objects. At the leaf level, each rectangle describes a single object; at higher levels the aggregation of an increasing number of objects. This can also be seen as an increasingly coarse approximation of the data set. – Wikipedia
{kind=link}
{kind=link}
{kind=link}
{kind=link}
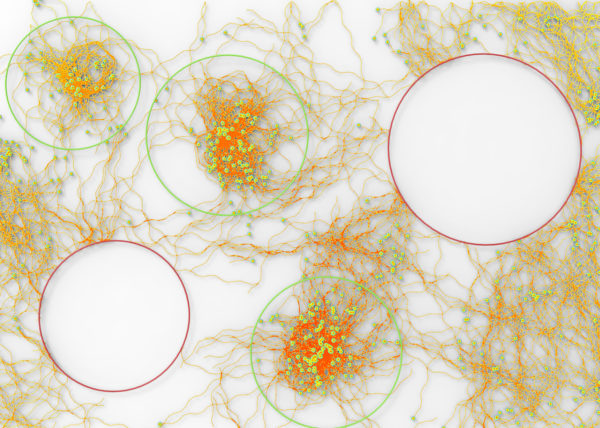
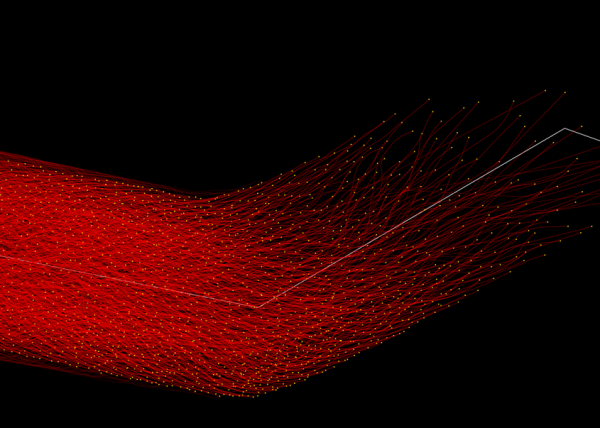
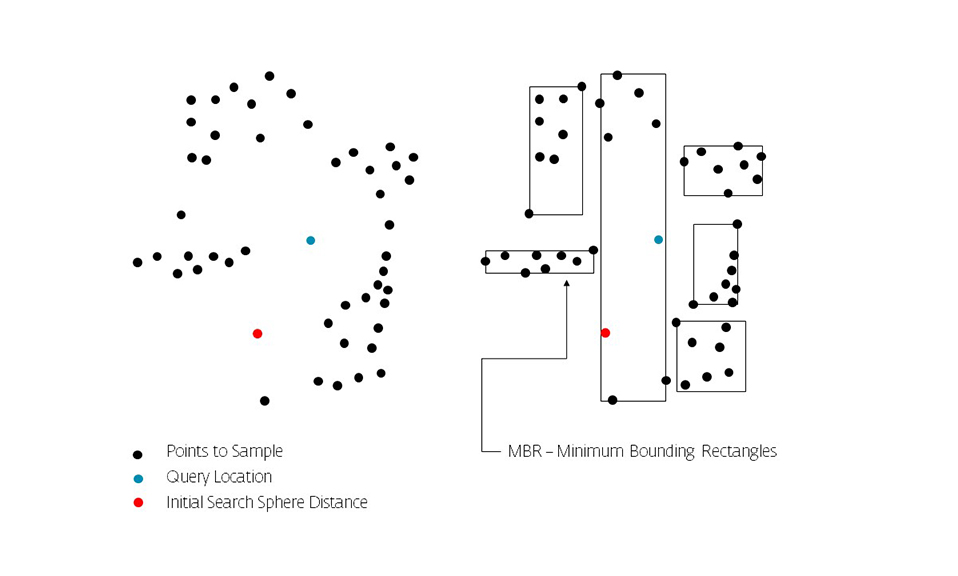 Bounding Regions should contain approximately the same number of nodes
Bounding Regions should contain approximately the same number of nodes
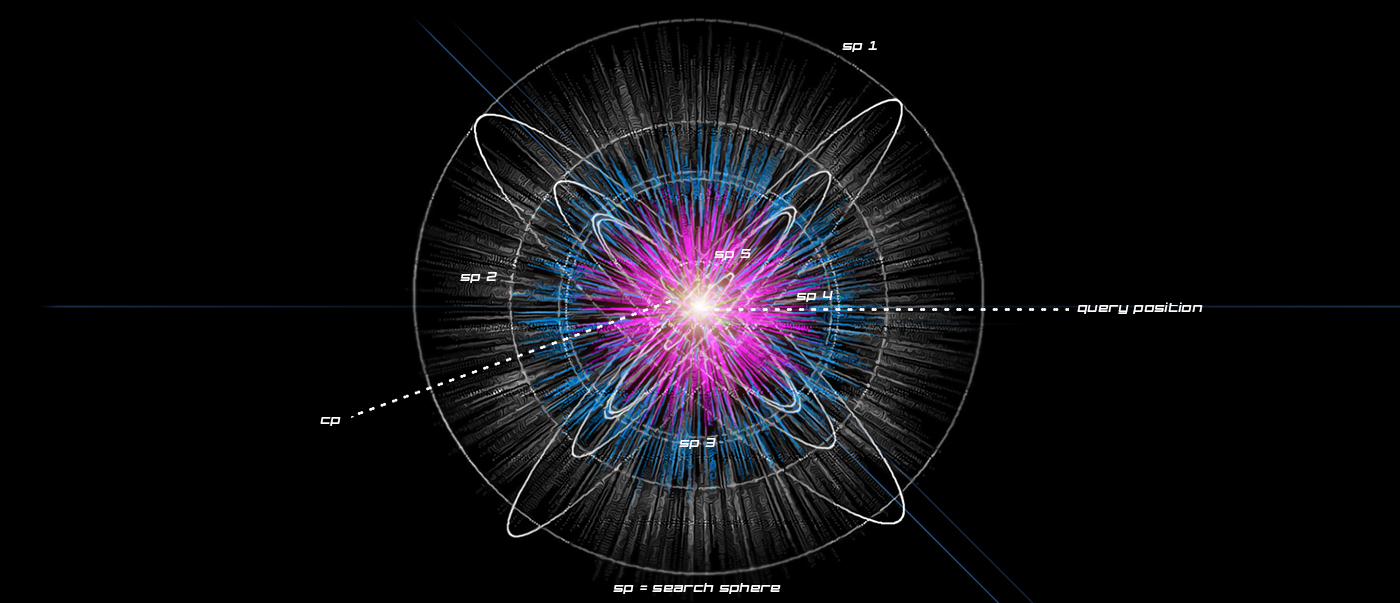
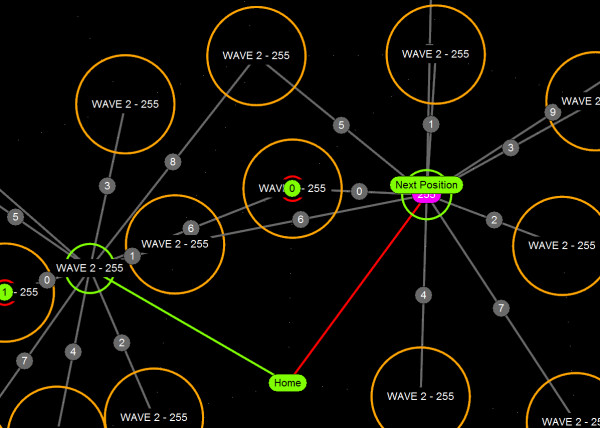
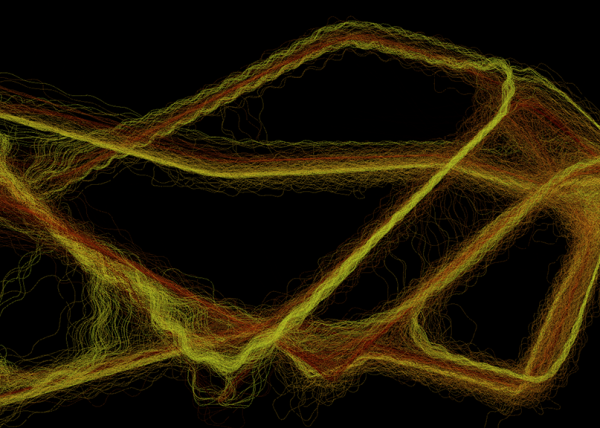
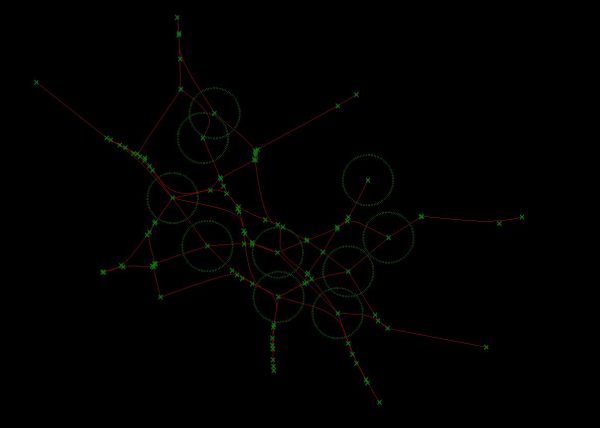
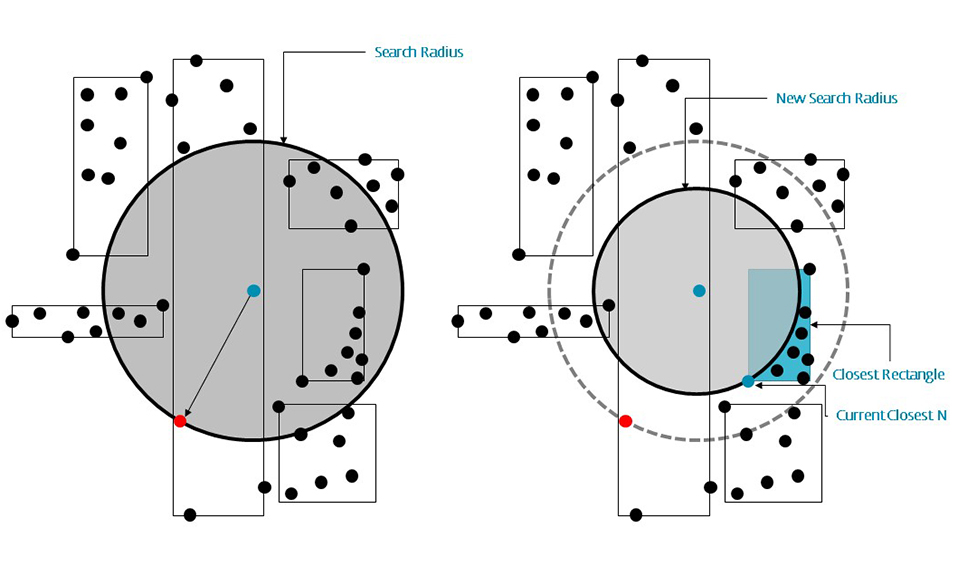 First the search find the closest bounding box, followed by the closest point inside that box. Distance to that point determines the next search radius
First the search find the closest bounding box, followed by the closest point inside that box. Distance to that point determines the next search radius
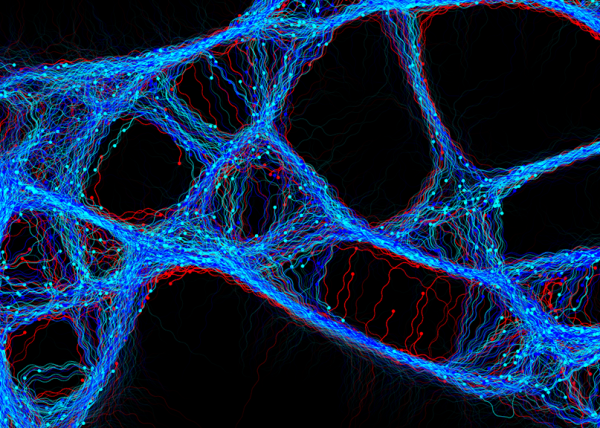
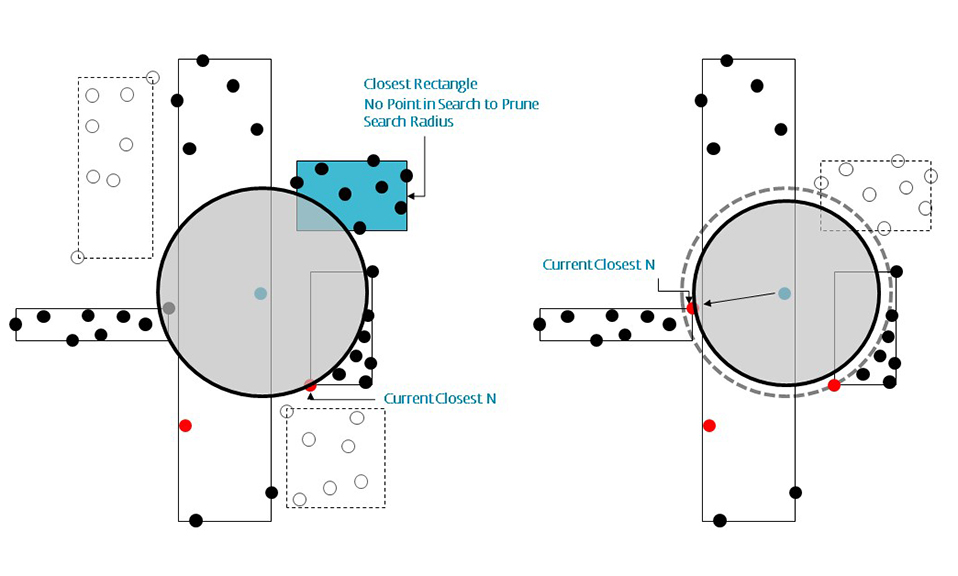 Using the Search Call Back function we repeatedly search until no new Best candidate is found. In this case the closest box did not contain a point inside the search radius therefore it is pruned and the search is repeated
Using the Search Call Back function we repeatedly search until no new Best candidate is found. In this case the closest box did not contain a point inside the search radius therefore it is pruned and the search is repeated
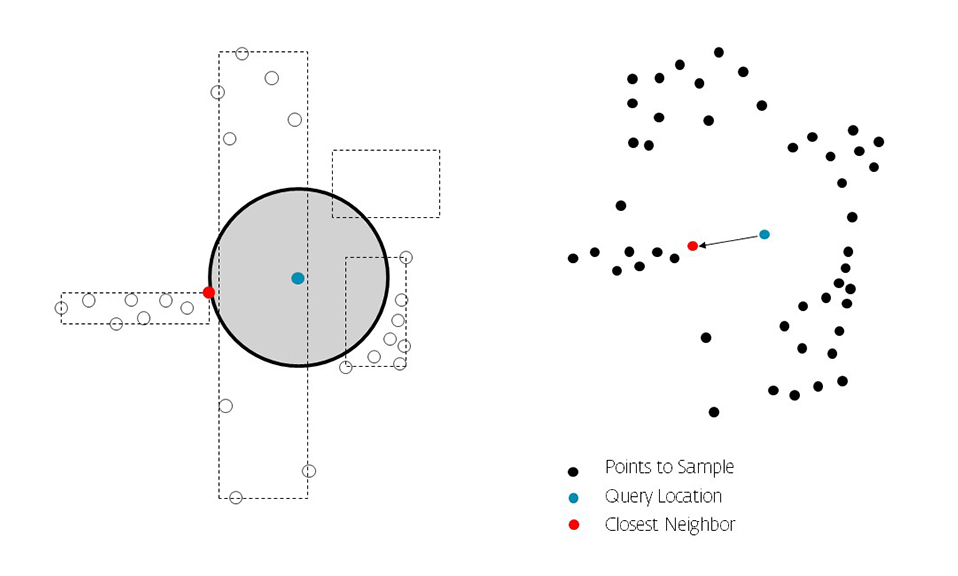 Once the search is repeated we see there are no more best candidates to chose from therefore the red point is our closest neighbor
Once the search is repeated we see there are no more best candidates to chose from therefore the red point is our closest neighbor
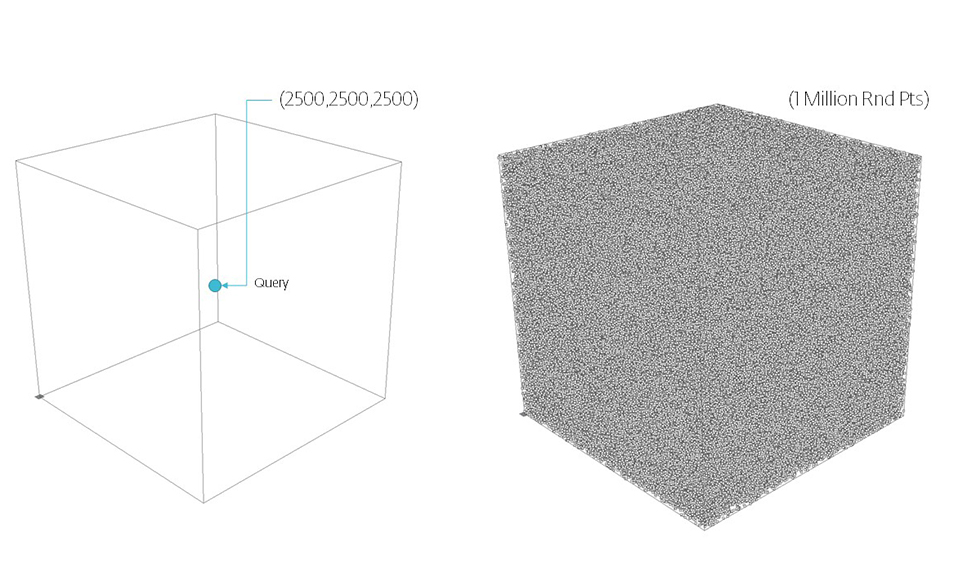
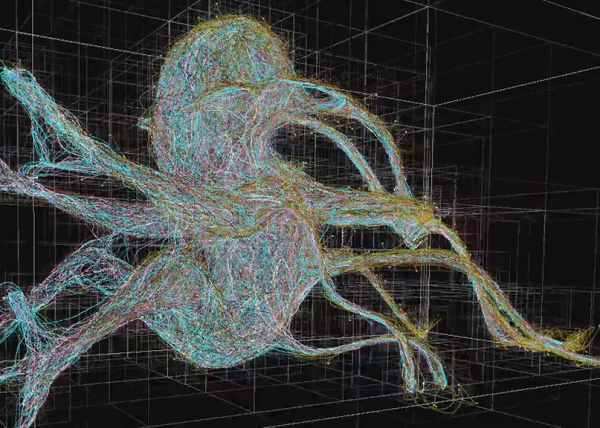
Calculation Time Comparison Between Code Versions in Seconds. Search Space Sampling 1 Million Points from 1 Point to find X nearest in a 500 unit radius then closest within that range. Searches 1 Million Points in a (5000,5000,5000) Unit Cube
RTREE Rhinocommon
- Tree Item Count = 1,000,000
- Found closest n point in 9 tests
- CALCULATION TIME TAKEN : 0.002 sec
- Search sphere size of 500
Rhinocommon Python
- Point Count = 1,000,000
- ClosestPoint = [2092.39 , 2955.144 , 2235.82]
- Number of Points in Range = 4151
- CALCULATION TIME TAKEN : 0.512 sec
- Search sphere size of 500
Rhinoscript Python
- Point Count = 1,000,000
- ClosestPoint = [2192.45 , 2958.38 , 2230.98]
- Number of Points in Range = 4236
- CALCULATION TIME TAKEN : 3.95 sec
Calculation Time Comparison Between Code Versions in Seconds. Single Search, non recursive. Sphere (r=500) Searches 1 Million Points in a (5000,5000,5000) Unit Cube
RTREE Rhinocommon
- Tree Item Count = 1,000,000
- Number of Points in Range = 1
- CALCULATION TIME TAKEN : 0.00099 sec
Rhinocommon Python
- Point Count = 1,000,000
- Number of Points in Range = 1
- CALCULATION TIME TAKEN : 0.015 sec
Rhinoscript Python
- Point Count = 1,000,000
- Number of Points in Range = 1
- CALCULATION TIME TAKEN : 2.72 sec

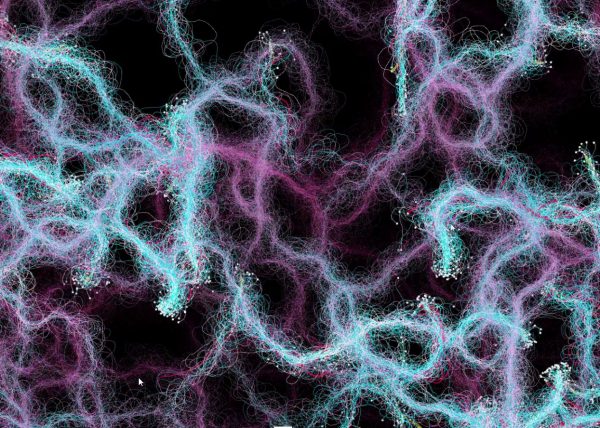
Calculation Time Comparison Between Code Versions in Seconds Agent Interactions while Mesh Sampling – Seeking for closest values within 4 units of their current position.
RTREE Rhinocommon
- Mesh Vertex Count = 393,216
- Number of Agents = 50
- Iteration Steps = 200
- CALCULATION TIME TAKEN : 9.7 sec
- Search Radius = 4
Rhinocommon Python
- Mesh Vertex Count = 393,216
- Number of Agents = 50
- Iteration Steps = 200
- CALCULATION TIME TAKEN : 1390 sec
- Search Radius = 4
Rhinoscript Python
- Mesh Vertex Count = 393,216
- Number of Agents = 50
- Iteration Steps = 200
- CALCULATION TIME TAKEN : N/A Either Crashes or gave up because time was insanely long
- Search Radius = 4
Why the drastic difference in performance?
Recently in Portfolio
- [K]ernels

- Nike A.I.R Prototypes

- [A]nisochromatic Meshing
- Nike After Dark Tour

- PARAPRAXIS
- [001.HRR] CONCEPT BIKE

- 2040:LUNAR.OUTPOST[a]
- HE.6 2020 Prototype

- CULEBRA.NET

- PYTORCH-CLASSIFIER
- Nike Zoom Superfly Elite

- BENGBU CITY OPERA

- Nike Footscape Flyknit DM

- Jordan Hyperdunk React

- KA-HELMET

- [C]ucarachas
- [S]eeker
- [O]h Baby
- [E]l Papa
- [S]hatter.Brain

- [S]tigmergy
- [F]orces
- CULEBRA.JAVA

- [C]ulebra.MultiBehaviors
- [S]ticky Stuff
- [S]entinels
- [G]allopingTopiary
- RELUXOED

- [SRC] . Semi Rigid Car
- [P]erlin
- [E]ternal Wanderers
- [W]heelie
- [S]labacube
- [M]esh Crawlers

- [L]a Silla
- [3]D BabyMaking Trackstars
- [3]D Trackers
- [2]D BabyMaking Trackers
- [T]rackers
- CULEBRA GRASSHOPPER

- culebra.[M]eshCrawlers.3D

- culebra.[H]ybrid.3D

- culebra.[F]lorgy

- culebra.[F]ockers.3D
- culebra.[F]ockers.2D
- culebra.[N]oisey.3D

- [E]l Nino
- culebra.[S]elfOrg

- [D]rippin

- culebra.[N]oisey.2D

- [C]reepyCrawlers

- [J]eepresesCreepers
- [T]2000
- PUFFER PLEATNESS

- EMERGEN[CY]

- [L]iquified
- [S]uckedComp

- [X]plosion
- MR. EW

- [H]airGoo
- [B]alled
- [n]injaStars
- [b]loomer
- [t]rip city
- TAPE GUNNED
- [B]oom

- [M]iller Time
- [D]elamjam
- [B]rain Zapper
- [B]ig Bird
- [E]gg Tube Pavillion
- [A]llice’s Easter Tree
- [S]weet Honey
- [U]M.Urgent

- [t]oo.urgent
- [B]onnie..+..Clyde
- [B]io Mess
- [EL]Mojado.Virus
- [W]HAT the …!
- [H]ot Lava
- [P]leat Diddy
- [t]erminator easter egg
- Mr. BB
- [B]less You
- [F]antastic + Interactive
- [S]oo_Minimally_Pathed
- [P]uffer Fish.Fab
- [M]an Eater
- [AHH] Alien House Hunters

- [W]eave Machine
- Sportbike Racing

- Grappling

- Kart Racing

Leave a reply